
Применение
Электронная программа стабилизации (ESP) должна вести автомобиль по заданному водителем курсу с целенаправленным воздействием на тормоз. Для этого в приборе управления заданный угол поворота рулевого колеса и заданное приводное усилие, прикладываемое к тормозной колодке, сопоставляется с фактическим поворотом, скоростью автомобиля и при необходимости отдельные колеса притормаживаются.
Для определения значения угла поворота рулевого колеса в принципе подходят все виды угловых датчиков. Но для обеспечения безопасности подходят модели, которые либо легко проверяются на правильность функционирования, либо — в идеальном случае — могут выполнять самопроверку. Используются потенциометры, оптические кодовые определители и магнитнорезистивные датчики. В большинстве используемых датчиков требуется, прежде всего, постоянная регистрация и сохранение текущих данных о повороте рулевого колеса, поскольку ходовые угловые датчики могут осуществлять измерения не больше 360°, а рулевое колесо легкового автомобиля имеет угловой диапазон ±720° (четыре оборота).
Конструкция и принцип действия
Датчик угла поворота рулевого колеса с анизотропным магниторезистивным элементом
Датчик угла поворота рулевого колеса LWS3 работает с «анизотропными магниторезистивными датчиками» (АМР), электрическое сопротивление которых изменяется из-за направления внешнего магнитного поля. Информация об угле в диапазоне четырех полных оборотов формируется путем измерения угла поворота двух зубчатых колес, которые приводятся в действие зубчатым колесо расположенным на рулевом валу. Оба зубчатых колеса различаются на один зуб, за счет этого для каждого варианта положения рулевого колеса существует однозначная пара параметров угла.
Благодаря математическому алгоритму (процесс вычислений по определенной схеме), рассчитывается угол поворота рулевого колеса, при этом можно корректировать точность измерений обоих анизотропных магниторезистивных датчиков. Дополнительно имеется возможность самоконтроля, когда через выход CAN можно передавать очень достоверный параметр измерения на прибор управления.
На рис. 1 схематично изображена конструкция датчика угла поворота рулевого колеса LWS3. На нем видны оба зубчатых колеса, в которые вставлены магниты. Над ними расположены датчики и электроника, обрабатывающая данные.
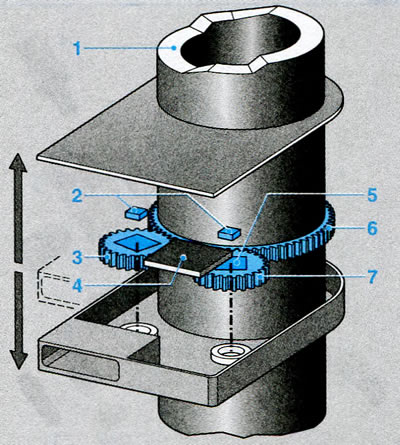
Рисунок 1. Анизотропный магнитнорезистивный датчик угла поворота рулевого колеса LWS3 (принцип). 1. Рулевой вал; 2. Измерительные ячейки АМР (анизотропные магниторезистивные); 3. Зубчатое колесо с зубцами; 4. Электроника для обработки данных; 5. Магнит; 6. Зубчатое колесо с η > m зубцами; 7. Зубчатое колесо с m + 1 зубцами
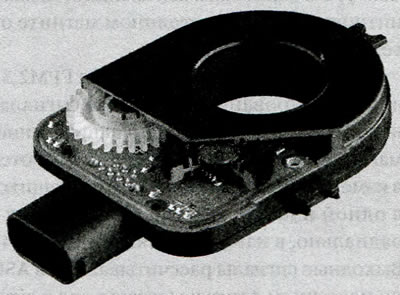
Рисунок 2. AMR-датчик угла поворота рулевого колеса LWS3 (конструкция)
Другая модель — датчик угла поворота рулевого колеса LWS4, который четко измеряет угол поворота рулевого колеса на 180°. Он устанавливается на конце вала оси рулевого колеса (рис. 3).
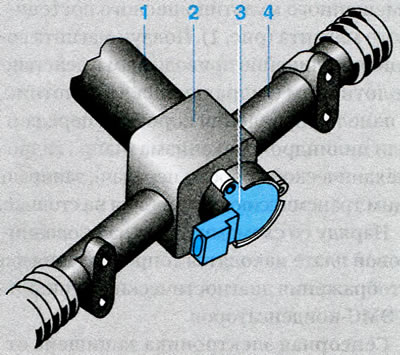
Рисунок 3. Анизотропный магниторезистивный датчик угла поворота рулевого колеса LWS4 для установки на конце вала управляемого моста. 1. Вал рулевого управления; 2. Рулевой механизм; 3. Датчик угла поворота рулевого колеса; 4. Рулевая рейка
Датчик угла поворота рулевого колеса с ГМР-элементом
Датчик LWS5 является первым датчиком угла поворота рулевого колеса, принцип работы которого основан на ГМР-эффекте (гигантский магниторезистивный эффект). Механическая конструкция и принцип действия заимствованы от LWS3. Модели LWS3 и LWS5 совместимы механически и электрически.
Гигантские магниторезистивные слои наносятся на планаризированную поверхность схемы обработки данных (вертикальная интеграция). ГМР-мост для измерения сопротивлений и схема обработки данных соединены друг с другом с помощью монтажных соединений. Эти короткие соединения увеличивают устойчивость датчика к внешним помехам.
Оба ГМР-элемента измеряют направление линий поля обоих магнитов. В микропроцессоре по этим результатом рассчитывается угол поворота. Коммуникация между сенсорным элементом и микропроцессором осуществляется через цифровой интерфейс (СП-интерфейс). Рассчитанный параметр угла поворота передается микропроцессором по CAN шине.
Из-за высокой чувствительности — по сравнению с AMP-эффектом (анизотропным магниторезистивным) — датчик LWS5 может работать с менее мощным магнитом и большим воздушным зазором. Это значительно сокращает затраты на материал и дизайн. Угловой диапазон в 360° отдельного ГМР-элемента (для АМР типичным является диапазон 180°) позволяет в модели LWS5 использовать зубчатые кольца меньшего размера. Поэтому ему необходимо значительно меньшее монтажное пространство, по сравнению с моделью LWS3. Кроме того, он дает большой диапазон масштабирования, который отражает диапазон измерений (от ±90° до ±780°) и в градусах дублирования. За счет этого достигается возможность приведения датчика в соответствие со специфическими требованиями различных производителей автомобилей.