
Параметры измерений
Акселерометры используются для:
- регулирования момента зажигания в зависимости от возникновения детонации в работе двигателя;
- регулирования системы натяжения ремней безопасности (например, подушки безопасности и натяжителя ремня безопасности);
- фиксирования ускорения транспортных средств для антиблокировочной системы (ABS) или системы стабилизации движения (ESP);
- оценки ускорения системы управления шасси автотранспортного средства.
Измеряемым параметром является ускорение а, которое часто приводится в виде кратности ускорения свободного падения gn (1 g = 9,81 м/с²) (стандартное значение для автотранспортного средства см. в Таблице 1).
Таблица 1. Диапазон измерения акселерометров
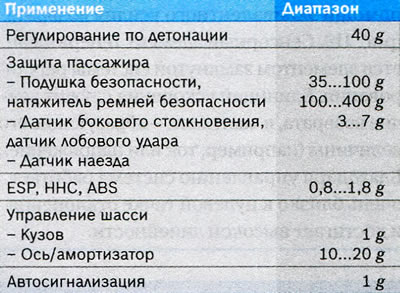
g. Ускорение свободного падения, 1 g = 9,81 м/с2
ННС. Система удержания автомобиля в начале движения при спуске или подъеме на склон
ABS. Антиблокировочная система
ESP. Система стабилизации движения
Принципы измерения
Акселерометры используются для измерения действующей силы F, которая измеряется посредством умножения значения ускорения а на инертную массу m:
(1) F = m · a
При этом, измеряют перемещения инертной массы.
Системы измерения перемещения
В системах измерения перемещения (рис. 1) масса m — сейсмическая масса — имеет упругое соединение с корпусом, ускорение а которого необходимо измерить.
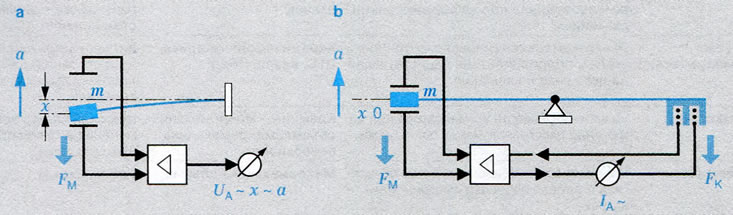
Рисунок 1. Датчики измерения ускорения. Схема: а. Измерено по отклонению стрелки на приборе; b. с позиционным автоматическим регулированием; а. Измерение ускорения; х. Отклонение подвижной части измерительного механизма; FM. Измерительная сила (сила инерции массы m); FK. Компенсирующая сила; IA. Выходной ток; UA. Выходное напряжение
Постоянное ускорение
В случае постоянного ускорения сила ускорения сбалансирована с усилием возврата направленной на х пружины с коэффициентом жесткости пружины с:
(2) F = m · a = c · x
Чувствительность измерений S системы сводится к следующей формуле:
(3) S = x/a = m/c
Соответственно, результатом большой массы и невысокой жесткости пружины является высокая чувствительность измерений.
Переменное ускорение
В случае динамического ускорения помимо силы натяжения пружины необходимо также учитывать силу затухания и силу инерции. Важная сила затухания пропорциональна скорости х и характеризуется при помощи коэффициента затухания р. Сила инерции пропорциональна ускорению х. Таким образом, данное уравнение (4) характеризует колебательные (резонансные) системы:
(4) F = m · a = c · x + p · x' + m · x"
При пренебрежении значением затухания (р=0) получаем следующее значение частоты резонанса:
(5) ω0 = √(c/m)
Таким образом, в соответствии с уравнением (3) чувствительность измерений S связана с частотой резонанса ω0 следующим образом:
(6) ω0² · S = 1
Это значит, что необходимо получить частоту резонанса, которая будет в два раза выше, но чувствительность при этом должна быть снижена на 1/4. Такая система пружина-масса отчетливо показывает достаточную постоянную пропорциональность между измеренным показателем и соответствующим отклонением лишь ниже частоты резонанса.
Получившееся отклонение преобразовывается в электрический сигнал по соответствующему методу измерения (сравните таб. 2).
Таблица 2. Принципы измерения
| Тип | Принцип | Техническое исполнение | Примеры применения |
| Пьезорезистивный | Измерение напряжения по изменению удельного объемного сопротивления полупроводника при деформировании давлением | Кремний - микромеханика объема, система тонких пленок | Применение в лабораторных условиях, ранее также - датчики столкновения |
| Пьезоэлектрический | Пьезоэлемент генерирует электрически сигнал, пропорционально действующей на него силе и давлению. | Керамический материал, ЦТС, кварц, ПВДФ | Датчики детонационного сгорания, ранее также - датчики столкновения |
| Емкостный | Изменение ёмкости конденсатора при изменении расстояния между обкладками. | Кремний - микромеханика объема, микромеханика поверхности | Широкий спектр применения в транспортных средствах |
| Термический | Поперечное отклонение нагретой области газа и определение асимметрии зоны нагрева | Микромеханика объема | Датчик наезда |
Регулирование по положению
Системы измерения перемещения позволяют применять принцип компенсации, при котором отклонение системы, обусловленное ускорением, регулируется при помощи эквивалентного усилия возврата (рис. 1b). Сенсорный элемент теперь является элементом замкнутой системы регулирования. Единицей ускорения служит усилие возврата, в частности — образующие его величины (например, ток или напряжение). Благодаря управлению система работает очень близко к нулевой точке отклонения и достигает высокой линейности.
Регулирование по положению затрагивает значительную область измерений, которая ограничивается только усилием возврата, а также более высокой граничной частотой, как и аналогичная система, которая не регулируется по положению (Рис. 1а).
Затухание
Для того чтобы избежать резонансного завышения, в чистых системах отклонения необходимо наличие определенного не зависящего от температуры затухания. Если коэффициент затухания рассчитывается в отношении остальных параметров уравнения (4), в результате получаем следующий коэффициент затухания по Леру D:
Данные безразмерные величины позволяют произвести простое описание и сравнение различных систем, склонных к колебаниям. Переходные характеристики и резонансное завышение определяются далее данным коэффициентом затухания. На практике предпочтительным является значение D=0,5...0,7 (рисунок 2).
В системах, которые регулируются по положению, затухание реализуется и устанавливается в системе регулирования.
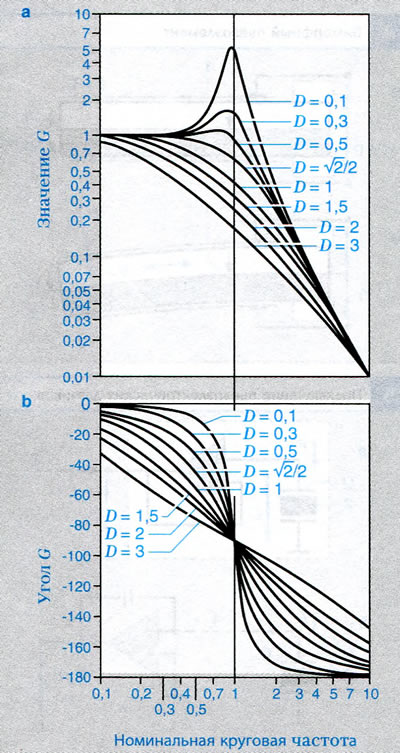
Рисунок 2. Резонансные кривые передаточной функции G. а. Резонансная кривая амплитуд; b. Кривая фазового резонанса сложной передаточной функции G(i·Q)=[X(i·Q)]/[α(i·Q)]; X(i·Q). Амплитуда отклонения; α(i·Q). Амплитуда импульсов ускорения; Q=ω/ω0. Номинальная круговая частота; D. Затухание
Физическая реализация
Большинство акселерометров, которые применяются сегодня в транспортных средствах, выполняются из кремния (микромеханика поверхности). При помощи емкостного анализа оценки на основании геометрии и стабильных параметров материалов определяется сигнал измерения, который в некоторой мере зависит от определяющих величин, например — от температуры. Маленькие измерительные конденсаторы данных датчиков расположены в непосредственной близости от электронных схем анализа, которыми они обслуживаются.
Преимуществом микромеханики поверхности является возможность регулировать положение системы и направлять ее благодаря подаче электростатической силы (на измерительные электроды или на дополнительно установленную часть электрода). Последний метод является настоящей электромеханической самопроверкой исправности средства, которое проверяет общий путь прохождения сигнала.
Механические системы измерения растяжения
Применение
Пьезоэлектрические датчики устанавливаются исключительно на транспортных средствах с акселерометрами и датчиками угловой скорости рыскания.
Принцип действия продольного эффекта Пьезоэлектрические материалы производят под воздействием силы F заряд Q, который отправляется через электроды на поверхность (рис. 3). Такой заряд является пропорциональным механическому напряжению, формирующемуся при помощи силы F. Материалы, использованные для производства пьезоэлектрических элементов, грубо разделяют на монокристаллы кварца и керамика.
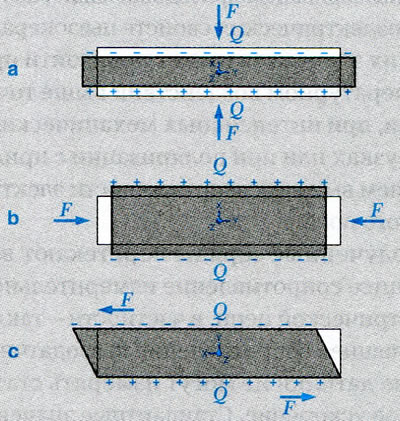
Рисунок 3. Формы пьезоэлектрического эффекта. а. Продольный эффект; b. Поперечный эффект; с. Эффект тяги; F. Сила; Q. Заряд
Пьезоэлектрические активные керамические элементы производятся методом спекания из измельченных ферроэлектриков. Таким образом, данные керамические элементы состоят из множества мельчайших кристаллов, ориентированных в пространстве в произвольном направлении. В процессе производства эти кристаллы поляризуются при приложении высокого напряжения. В результате этого упорядочивается беспорядочная поляризация микрокристаллов.
Деполяризация и, следовательно, потеря пьезоэлектрических свойств пьезокерамических элементов может произойти при температурном воздействии выше точки Кюри, при интенсивных механических нагрузках или при поляризации с приложением высокой напряженности электрического поля.
Полученные заряды перетекают во внешнее сопротивление измерительной электрической цепи, в частности — также во внешнее сопротивление пьезодатчика. Такие датчики не могут измерять статическое ускорение. Стандартные значения нижней частоты среза пьезаэлектричес-кого акселерометра 1-2 Гц.
Принцип действия: поперечный и эффект тяги
Помимо продольного пьезоэлектрического эффекта (рис. За) существует также поперечный эффект и эффект тяги (рис. 3b и 3с). На практике эти эффекты встречаются совместно. Взаимозависимость между полученным зарядом и воздействующим механическим напряжением формулируется в виде тензорного уравнения.
Поперечный эффект, например, используется для измерения напряжения на изгиб биморфного пьезоэлемента, который состоит из двух противоположно поляризованных пьезокерамических элементов (рис. 4). При изгибе двухслойного составного керамического элемента одна половина растягивается (ε > 0), а вторая — сжимается (ε < 0). Из-за противоположной поляризации керамических элементов частичное напряжение U1 и U2 добавляется к итоговому общему напряжению U.
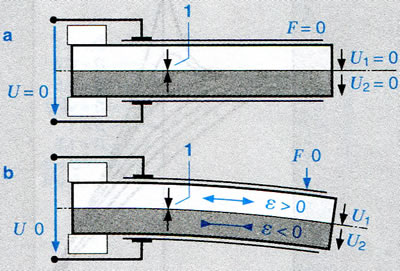
Рисунок 4. Биморфный пьезоэлемент. а. В состоянии покоя; b. При изгибе, растяжении вверху (ε > 0) и сжатии внизу (ε < 0); 1. Направление поляризации; F. Измерительная сила; U. Суммарное напряжение; U1, U2. Частичное напряжение
Анализ электрического сигнала Пьезоэлектрические сенсорные элементы могут быть смоделированы как источники напряжения с емкостным внутренним сопротивлением. Для идеального элемента внутреннее сопротивление является бесконечно высоким. Соответственно, обработка сигнала является надежной.
Для согласования полного сопротивления в следующих системах существует две возможности:
- электрометрический усилитель (рис. 5а): здесь напряжение, которое прилагается к электродам, учитывается и усиливается с крайне высокоомным входом. Паразитные емкости, тем не менее, входят в передаточные функции;
- зарядовый усилитель (рис. 5b): здесь заряд промежуточно накапливается в каждом втором конденсаторе. Паразитные емкости не имеют никакого влияния.
В обоих случаях необходимо принимать во внимание сопротивления передаточной функции, которое располагается параллельно сенсорному элементу.
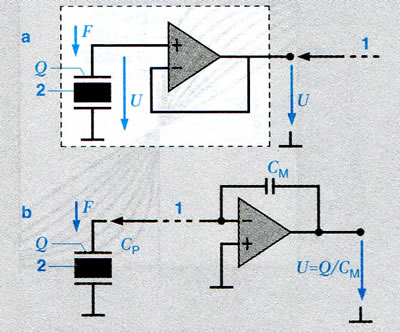
Рисунок 5. Подключение пьезоэлектрических датчиков. а. Электрометрический усилитель; b. Зарядовый усилитель; 1. Подвод; 2. Пьезоэлектрический элемент с емкостью СP; CM. Измерительный конденсатор; F. Измерительная сила; Q. Заряд; U. Напряжение
Термические акселерометры
Термические акселерометры формируют «пузырь нагретого газа» над нагревательным элементом. Узкая нагретая область газа обладает достаточной плотностью по сравнению с окружающим охлажденным газом.
При возникновении продольного ускорения газовая область достаточной плотности смещается внутри окружающего охлажденного газа. Возникающая в результате асимметрия фиксируется термоэлементами или сопротивлением в виде мостовой схемы. Напряжение мостовой схемы создает сигнал ускорения.
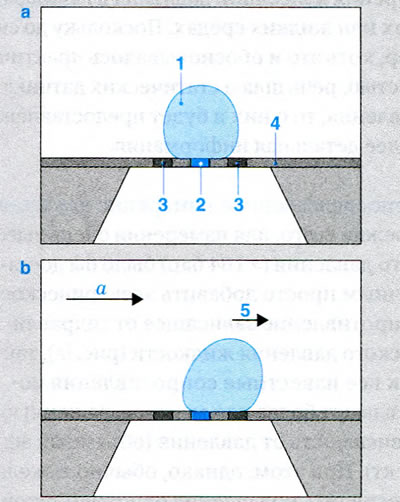
Рисунок 6. Принцип термических акселерометров. а. Ускорение а = 0; b. Ускорение а > 0; 1. Подогретая газовая область; 2. Нагревательный элемент; 3. Датчик температуры; 4. Слой носителя; 5. Смещенная зона тепловой нагрузки
Конструктивное оформление
Конструктивное оформление (англ.: Packaging), выполненное соответствующим целесообразным образом, играет решающую роль для качества датчиков. Датчики ускорения охватывают параметры без подвижного в отношении окружения соединения, а потому они могут быть просто герметично сконструированы. Должна быть обеспечена жесткая механическая стыковка с измерительным элементом, чтобы отсутствовали существенные искажения дополнительных эластичных или свободных промежуточных элементов измерения. Такая жесткая стыковка, однако, может не привести к тому, что, например, исходящее тепловое расширение измерительного элемента будет перенесено на датчик, что повлияет на измеряемую величину.
Примеры применения:
- пьезоэлектрические датчики ускорения (биморфные элементы изгиба, продольные элементы — такие как датчик детонационного сгорания);
- микромеханические датчики ускорения, выполненные в микромеханике корпуса и микромеханике поверхности).