
Измерительные величины
Датчики числа оборотов и скорости измеряют угол или путь, пройденный за единицу времени. В обоих случаях, когда речь идет об автомобиле, имеются в виду измерительные величины, которые определяются между двумя участниками движения или между дорогой или другим автомобилем. Однако следует также измерять абсолютную угловую скорость в пространстве или вокруг осей автомобиля (угловая скорость рыскания автомобиля). Так, например, для регулирования динамики движения определяется угловая скорость рыскания автомобиля вокруг вертикальной оси или нормальной оси (англ.: yaw rate).
Принципы измерения
Обычные датчики для измерения числа оборотов работают по принципу больших измерительных эффектов (например, индуктивный). Поэтому они в основном электрически пассивны, т.е. в любом случае не оснащены электроникой по месту использования. Последние поколения датчиков работают в основном по принципу очень маленьких измерительных эффектов (например, датчики Холла) и, поэтому нуждаются в интегрированной электронике для подготовки сигнала. В широком понимании они относятся уже к «умным» (или как это называется здесь «активным») датчикам.
Приемники абсолютных скоростей (угловой скорости рыскания) нуждаются уже в очень сложной электронике, устанавливаемой непосредственно на датчике, поскольку используемые им измерительные эффекты не только очень маленькие, но и нуждаются в сложной подготовке сигнала.
Для инкрементального измерения числа оборотов могут использоваться совершенно различные (иногда совсем недорогие) физические эффекты. Однако, например, оптические и емкостные приемники меньше подходят для жестких условий эксплуатации в автомобиле. Практически без исключений предпочтение отдается датчикам, использующим магнитный принцип.
Относительное измерение числа оборотов и скорости
Примерами относительной угловой скорости являются:
- число оборотов коленчатого и распределительного вала;
- число оборотов колеса (для ABS/ASR/ESP) и
- число оборотов дизельного топливного насоса.
Измерение осуществляется в основном с помощью инкрементальной приемной системы, состоящей из зубчатого колеса и датчика числа оборотов.
При определении относительной угловой скорости различают число и величину считываемых окружных отметок ротора между следующими датчиками (рис 1):
- инкрементальный датчик с небольшим шагом, который до определенного градуса угла позволяет выполнять считывание показателей мгновенной скорости, изменяемой по окружности, или очень незначительного углового перемещения.
- Датчик вращения, который различает небольшое число элементов окружности (например, число цилиндров двигателя) и
- простой датчик частоты вращения, который считывает данные о средней угловой скорости с помощью только единственной маркировки каждого оборота.
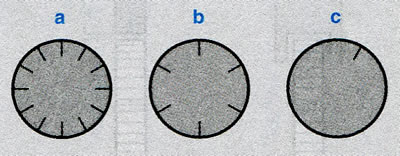
Рисунок 1. Считывание угловой скорости. а. Инкрементальный датчик вращения; b. Сегментный датчик вращения; с. Датчик числа оборотов
Формы датчиков
Используются следующие различные формы датчиков (рис. 2):
- форма стержневого датчика;
- вилочковая или барьерная форма;
- (внутренняя и наружная) кольцевая форма.
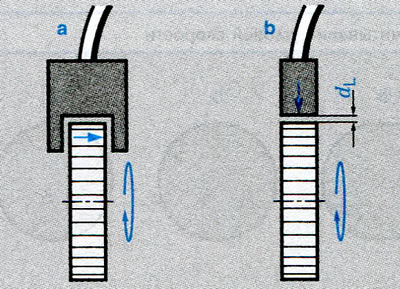
Рисунок 2. Формы датчиков. а. Вилочковая форма (комплектный или створчатый принцип); b. Стержневая форма (принцип приближения); dL. Ширина воздушного зазора
Самой простой и предпочтительной формой датчика (с точки зрения монтажа) является стержневая форма, при которой зубцы ротора приближаются к датчику. Иногда используется и вилочковая или комплектная форма, которая во время монтажа требует определенной направленности относительно ротора. От применения формы, которая кольцом охватывает роторный блок, уже почти отказались. Только на концах вала все еще используется внутренняя кольцевая форма, которая вставляется вовнутрь на конце полого и инкрементно структурированного вала.
К сожалению, наиболее часто используемая форма стержневого датчика демонстрирует наименьшую измерительную чувствительность и ее применение проблематично при слишком больших воздушных зазорах. Гораздо более нечувствительной к аксиальному и радиальному люфту является вилочковая форма. Самые трудоемкие кольцевые формы сочетают в себе наибольший измерительный сигнал с высокой нечувствительностью к геометрическим допускам.
Традиционно индуктивные датчики являются неудовлетворительными с некоторых точек зрения. Они имеют амплитуду, не зависимую от числа оборотов, и поэтому не подходят для низкого числа оборотов. При их использовании возможен только сравнительно небольшой допуск воздушного зазора, и они в большей степени не в состоянии различать колебания воздушного зазора (вибрации) импульсов числа оборотов. Наконечник датчика следует защищать от воздействия горячих компонентов (например, тормоза) и высоких температур.
Соответственно, в новых датчиках стремятся к наличию следующих дополнительных характеристик:
- статистический сбор и обработка данных (т.е. нулевое число оборотов или очень низкая пусковая частота вращения или частота вращения колеса),
- больший воздушный зазор (неотрегулированный монтаж с воздушным зазором больше 0),
- маленький размер,
- независимость от колебаний воздушного зазора,
- независимость от температуры (≤200°С),
- определение направления вращения (опционно для навигации) и
- определение опорного сигнала (зажигание).
Для выполнения первого условия прекрасно подходят, например, магнитостатические датчики (Холла, магниторезистор, AMR). Они стопроцентно удовлетворяют и второму и третьему условию.
На рисунке 3 изображены принципиально возможные стержневые формы, которые в целом не зависят от колебаний воздушного зазора. При этом различают датчики, которые работают в радиальном направлении, и датчики, сориентированные тангенциально. Таким образом, магнитостатические измерительные зонды могут различать северный и южный полюс совершенно независимо от магнитно-активного явнополюсного ротора.
В магнитно-пассивных роторах знак выходного сигнала не зависит от воздушного зазора, если они выполняют считывание тангенциальной силы поля (недостатком здесь является воздушный зазор, который часто создает сам датчик).
Часто применяются также датчики дифференциального поля и градиентные зонды, выполняющие измерения радиально. Они определяют в принципе только градиенты радиальных компонентов поля, знак которых изменяется не в зависимости от воздушного зазора, а только в зависимости от угла поворота.
Роторы
Ротор играет важнейшую роль в процессе измерения числа оборотов. Зачастую его предоставляет производитель автомобиля, в то время как чувствительный элемент поставляет субподрядчик. Раньше почти повсеместно использовались магнитно-пассивные роторы, изготовленные из магнитомягкого материала (зачастую железа). Они более экономичны, чем магнитотвердые явнополюсные роторы. Кроме того, они просты в использовании, поскольку не магнетизированы и не представляют опасности в связи размагничиванием (при хранении). В принципе, они являются —непосредственно в сочетании со стержневыми датчиками — самой тяжелоизнашивающейся формой ротора.
Собственный магнетизм индукторов (магнитно-активные роторы) позволяет при равной ширине инкремента и одинаковом выходном сигнале иметь значительно больший воздушный зазор.
Пассивные роторы существуют, прежде всего, в форме зубчатых колес, которые либо уже существуют (зубчатый венец стартера), либо целенаправленно используются для выработки сигнала (ABS). В последних используются также формы с планарно нарезанными зубцами и аксиально считывающие формы.
При считывании числа оборотов или положения коленчатого вала (например, на зубчатом венце стартера) для каждого оборота может использоваться и определяться опорный сигнал. Этот опорный сигнал должен позволять осуществлять оптимальную и свободную от неполадок синхронизацию зажигания и впрыска. В качестве опорного сигнала годится, например, полностью или частично удаленный зубец. Этот отсутствующий зубец может распознаваться из-за его большего временного периода, поскольку установлено, что число оборотов двигателя может изменяться только постепенно, а не толчками.
Наряду с зубчатыми колесами в качестве экономичных роторов до сих пор используются штампованные диски с отверстиями или гофрированные кольца (ABS).
Только начало использования датчиков ABS, интегрированных в подшипник ступицы колеса, привело к применению явнополюсных роторов, которые частично выполняли функцию в том числе уплотнительного кольца радиального уплотнения) (соединенный с помощью пластика магнитный порошок). «Датчики спидометра» также в миниатюрном исполнении или в капсуле, соединенные с одним из колес автомобиля с помощью гибкого вала по кратчайшему пути, содержат роторы с малым числом полюсов для вырабатывания сигнала скорости. Они зачастую считываются встроенными датчиками Холла.
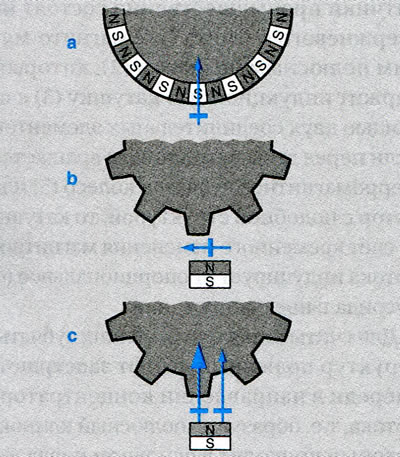
Рисунок 3. Датчики, не чувствительные к колебаниям воздушного зазора. а. Зонд радиального поля с ротором; b. Тангенциальный зонд; с. Дифференциальный зонд с зубчатым колесом
Индуктивные датчики
Индуктивные датчики уже находили применение как катушечные датчики для измерения числа оборотов, когда еще не существовало моделей, выполненных по микростурктурной технологии (например, Холла). Они используют закон индукции для измерения скорости вращения (угловой скорости), т.е. создают на своем двухполюсном выходе напряжение которое пропорционально временному изменению магнитного потока Ф (w число витков):
UA = Uind = w·dФ/dt
Поток Ф является также функцией положения (вращения) х и воздушного зазора dL:
При Ф = Ф(х, dJ und dL = const действует:
UA = Uind = w·dФ/dx · dх/dt
причем dx/dt является измеряемой скоростью вращения (угловой скоростью).
Уравнение наглядно отображает слабость индуктивных датчиков: если воздушный зазор dL невозможно поддерживать неизменным (например, при наличии вибрации или механическом люфте), он также создает временное изменение потока, как и скорость измерения. Этот эффект может вызвать импульсы напряжения, которые невозможно отличить или трудно отличить от настоящих сигналов частоты вращения. Такие ошибочные импульсы могут иметь большую амплитуду, поскольку поток изменяется экспоненциально в соответствии с воздушным зазором, а колебательный процесс (например, вибрация тормозов) часто имеет высокочастотную природу.
Поэтому индуктивные датчики всегда являются и динамическими датчиками. В принципе, они не предназначены для считывания слишком медленных скоростей (квазистатические или статические), поскольку их выходной сигнал стремится в этом случае к нулю. Исключением являются только катушечные датчики, на которые подается только несущая частота, работающие по принципу демпфирования или вихревого тока, практически не использующиеся в автомобильной промышленности.
Индуктивные датчики частоты вращения в принципе состоят из трех важных магнитных компонентов (рис. 4):
- жестко закрепленной катушки;
- детали из технического железа и
- постоянно-магнитной детали.
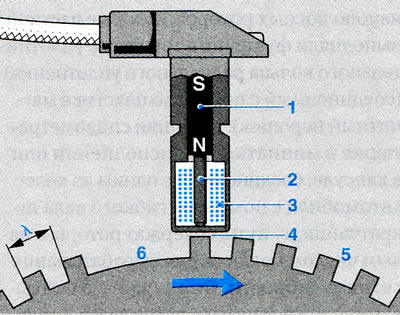
Рисунок 4. Индуктивный датчик частоты вращения. 1. Стержневой магнит; 2. Магнитомягкий полюсный штифт; 3. Индукционная катушка; 4. Воздушный зазор dl; 5. Ферромагнитное зубчатое колесо (ротор или импульсное колесо); 6. Опорный сигнал или объемный сигнал; λ. Расстояние между зубцами
Смена потока, необходимая для создания выходного напряжения, производится за счет движения или вращения магнитномягкой или твердой детали. Индуктивные датчики преимущественно состоят из стержневого магнита (1) с магнитомягким полюсным штифтом (2), который держит индукционную катушку (3) с помощью двух соединительных элементов. Если перед этим приемником вращается ферромагнитное зубчатое колесо (5) или ротор с подобной структурой, то катушка за счет временного изменения магнитного потока индуцирует пропорциональное (синусоидальное) напряжение.
Для считывания очень мелких зубчатых структур полюсный штифт заостряют спереди в направлении концентратора потока, т.е. образуют «полюсный клинок», который проходит в основном через металлический или пластиковый корпус и приспосабливается по форме и направлению к инкрементальной структуре.
На роторе дополнительно можно разместить один или несколько опорных сигналов (6). Рис. 5 демонстрирует прохождение потока и индуцированное напряжение в случае с отдельным опорным сигналом (паз, кулачок, полюсный штифт).
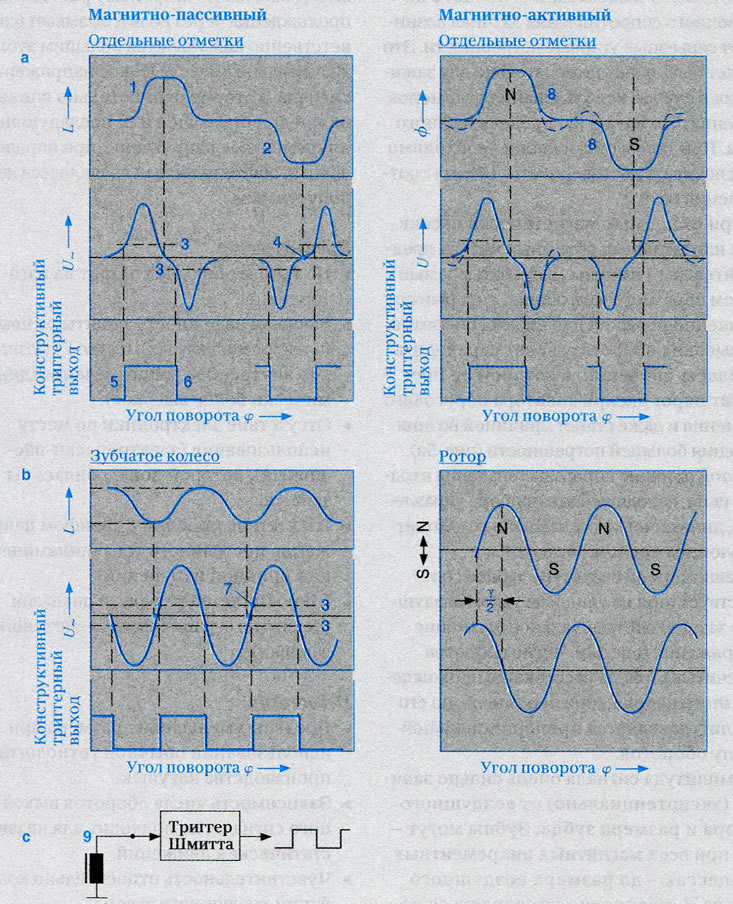
Рисунок 5. Прохождение тока и напряжения по индуктивному датчику. а. Отдельное магнитное маркирование на один оборот; b. Периодическая инкрементальная структура (например, зубчатое колесо, полюсное колесо); с. Определяемое переключение; 1. Кулачок; 2. Паз; 3. Волны переключения; 4. Определение резкого прохождения через ноль; 5. Подготовительный фронт; 6. Фронт переключения; 7. Момент переключения; 8. Полюсные штифты; 9. Датчик; γ/2. Смещение фаз; L. Индуктивность; U. Напряжение; Ф. Магнитный поток
Обычно для электронного считывания такого опорного сигнала используют вертикальное прохождение через ноль внутри максимального показателя потока. На основании закона магнитной индукции амплитуда сигнала является пропорциональной числу оборотов во всех фазах.
Для достаточно надежного определения (без помех) в приборе управления расстояние между пиками двойного импульса (либо периодического импульса напряжения) USS должно составлять не менее 30 мВ. Недостатком индуктивного датчика является то, что его выходное напряжение при высокой скорости/высоком числе оборотов может привести к слишком высоким показателям, значительно выше 100 В, которые гораздо сложнее обработать электронным способом.
Если высокие скачки напряжения срезаются с помощью полупроводниковых стабилитронов, в связи с возникающими в этой связи изменениями полного нагрузочного сопротивления датчика возникают серьезные угловые погрешности. Это может быть очень нежелательно для зажигания в случае использования угломеров коленчатого вала и распределительного вала. При таком применении необходимо обеспечивать достоверность угловых соотношений ок. 0,2°.
При отдельных магнетически пассивных или активных объемных метках предварительный импульс, вырабатываемый полем обратного замыкания, который совершенно неважен для низких оборотов, на высоких оборотах может переходить в область значений, в которой он превысит порог дискриминатора порогового значения и даже станет причиной возникновения большей погрешности (рис. 5а). По этой причине пороговые значения входной цепи, находящейся в приборе управления, динамически согласованы с соответствующим числом оборотов.
Равномерной структуре зубцов соответствует (при не слишком узком воздушном зазоре) синусоидальное движение напряжения (рис. 5b). Число оборотов рассчитывается по расстоянию прохождения этого напряжения через ноль, но его амплитудаявляется пропорциональной числу оборотов.
Амплитуда сигнала очень сильно зависит (экспотенциально) от воздушного зазора и размера зубца. Зубцы могут — как при всех магнитных инкрементных процессах — до размера воздушного зазора dL прекрасно определяться по половине или трети расстояния между зубцами
dL ≤ λ/(2...3)
Благодаря обычным зубчатым колесам кулачкового вала и ABS перекрываются воздушные зазоры размером до 0,8 или 1,5 мм. Метка, необходимая для зажигания и впрыска, выполняется благодаря пропуску одного или двух зубцов или закрытию места, где зубец отсутствует. Она определяется по широкому расстоянию прохождения через ноль и вызывает (соответственно кажущемуся большим зубцу) значительно более высокое напряжение сигнала, которое отрицательно влияет на предшествующее или последующее инкрементное напряжение, при определенных обстоятельствах являющееся недопустимым.
Преимущества:
- Не требует больших затрат на изготовление.
- Высокая надежность зашиты от помех (электромагнитных): низкое статическое внутреннее сопротивление (динамически более высокое).
- Отсутствие электроники по месту использования (электрически-пассивный), которой понадобилась бы защита.
- Отсутствие проблем с дрейфом напряжения постоянного тока (динамический принцип измерений).
- Широкий температурный диапазон (первично ограничивает за счет свойств заливки).
Недостатки:
- Пределы уменьшения размера при использовании обычной технологии производства катушек.
- Зависимость числа оборотов выходного сигнала, не подходит для квазистатических движений.
- Чувствительность относительно колебаний воздушного зазора.
Примеры использования:
- Индуктивный датчик числа оборотов двигателя (датчик частоты вращения кулачкового вала).
- Индуктивный датчик числа оборотов колеса.
- Индукционный датчик положения распределительного вала (транзисторная система зажигания с помощью индукционного датчика TZ-I).
- Датчик хода иглы (впрыск дизельного топлива).
Магнитостатические датчики
Квазистатическое определение числа оборотов преимущественно реализуется с помощью магнитостатических датчиков. Их выходной сигнал, зависящий не от числа оборотов, а только от силы поля, даже при высоком числе оборотов имеет преимущество более легкого электронного использования напряжения сигналов, ограниченных по сумме. Кроме того они дают преимущество уменьшения практически до любого размера и интегрированного увеличения сигнала или предварительной обработки сигнала по месту использования. По причине меленького размера с их помощью можно реализовывать сложносоставные системы, например, дифференциальное расположение или расположение с интегрированным определителем направления.
Серьезным недостатком таких активных датчиков является в первую очередь то, что диапазон их рабочей температуры определяется в основном входящей в комплект распознающей электроникой на основе кремния, которая, как правило, не выдерживает таких высоких температур, какие выдерживают элементы датчика.
С некоторых пор активные датчики укомплектовываются также выходами (двухполюсными), чтобы в будущем недорогой вид подключения с помощью двух проводов не рассматривался как специфическое преимущество индуктивных катушечных датчиков.
Створчатое включение эффекта Холла
Если есть необходимость использовать кремниевые датчики Холла для инкрементального измерения частоты вращения, то для надежного и однозначного процесса переключения должен быть обеспечен достаточно высокий индукционный такт обычно 40...50 mT. Этого можно добиться с помощью обычных датчиков Холла для выдерживаемых диапазонов воздушного зазора только тогда, когда они включаются пластинчатым экраном (например, как датчик момента искрообразования в старых электронных системах зажигания). Датчик и относящиеся к нему электронные схемы обработки сигнала интегрированы прямо на IC Холла.
Это IC Холла (изготовленная по биполярной технологии, разработана для температуры до 150°С и прямого бортового подключения) находится в почти замкнутой магнитной цепи, состоящей из постоянного магнита и полюсов (рис. 6). Магнитомягкое триггерное колесо (например, приводящееся в действие кулачковым валом) движется в зазоре между ними. Пластина триггерного колеса экранирует магнитное поле, в то время как прорезь позволяет ему беспрепятственно воздействовать на датчик. При этом обеспечивается надежное функционирование датчика даже тогда, когда пластина погружается на различную глубину или изменяет свое положение воздушного зазора в радиальном направлении, т.е. вертикально относительно направления вращения.
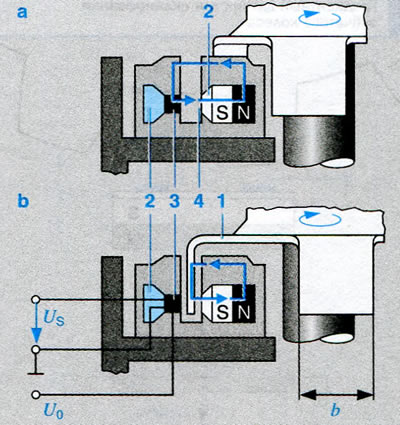
Рисунок 6. Пластинчатое управление эффектом Холла. а. Открытый магнитный поток; b. Замкнутый магнитный поток; 1. Замыкатель (заглушка) с шириной b; 2. Магнитомягкий проводник поля; 3. IC Холла; 4. Воздушный зазор; UO Напряжение питания; US Напряжение датчика
Датчики Холла с пластинчатым управлением используются преимущественно как датчики вращения. При слишком узких зазорах замыкателя магнитное поле практически не проходит и нужного индукционного хода невозможно добиться.
Простые датчики Холла в форме стержня
Простые датчики Холла, имеющие один магнит рабочей точки, в форме стержня подходят для статического или квазиста-тического сканирования магнитно-пассивного ротора (рис. 7а, зубчатое колесо), поскольку намагничивание рабочей точки (в отличие от датчиков с пластинчатым управление включения эффекта Холла) слишком сильно зависит от ширины воздушного зазора, а индукционный ход, которого можно добиться в таком расположении, слишком мал для надежного переключения. Пороги переключения подключенного последовательно компаратора порогового значения (триггер Шмитта) должны постоянно настраиваться на изменяющуюся (плавающую) рабочую точку. Использование в таком виде возможно, только если отказаться от применения гальванической связи и статической оценки сигнала. Развязывающие конденсаторы, необходимые для таких расположений —обозначенных как датчики ΔФ — все-таки связаны с дополнительными трудозатратами и утратой эксплуатационной надежности.
Простые датчики Холла подходят для сканирования магнитно-активного ротора (рис. 7b, индуктор). В этом поле можно отказаться от магнитов рабочей точки, датчик будет управляться ротором только вокруг нулевой точки с переменной полярностью. При увеличении воздушного зазора магнитный диапазон регулирования уменьшается; положение рабочей точки (В=0) больше не изменяется. Поскольку нулевая точка в новых датчиках Холла в принципе устойчива к изменениям температуры, пороги переключений последовательно подключенного компаратора порогового значения можно устанавливать достаточно узко. Это позволяет получать относительно большую ширину воздушного зазора. Колебания воздушного зазора в таком расположении не могут вызывать неотработанные импульсы, поскольку они не приводят к смене полюсов. Смена полюса характеризует только поступательное измерительное движение (вращение).
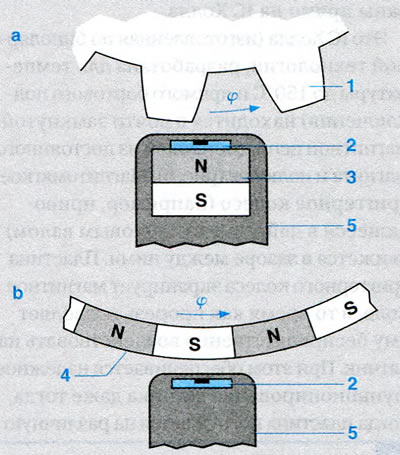
Рисунок 7. Стержневые датчики Холла. а. Пассивный ротор; b. Активный ротор; 1. Инкрементный ротор; 2. (Простой) IC Холла; 3. Постоянный магнит; 4. Индуктор; 5. Корпус
Градиентные датчики
Градиентные датчики (Рис. 8), которые можно создать, например, на основе дифференциальных датчиков Холла или дифференциальных магниторезисторов, гораздо лучше подходят для сканирования магнитно пассивных роторов, чем простые датчики Холла. Они оснащены постоянным магнитом, рабочие поверхности которого, восприимчивые к движениям зубчатого колеса, гомогенизируются тонкой ферромагнитной пластинкой (поз. 2). На ней расположены два гальваномагнитных элемента (обобщающее значение для датчиков Холла и магниторезисторов) почти на половине расстояния до верхушки датчика.
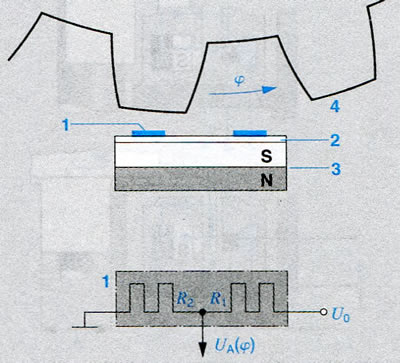
Рисунок 8. Градиентный датчик для сканирования зубчатого колеса. 1. Магниторезисторные сопротивления R1, R2 или элементы Холла H1, Н2; 2. Ферромагнитная пластинка (магнитомягкая подложка); 3. Постоянный магнит; 4. Зубчатое колесо; UO. Питающее напряжение; UA(φ). Измерительное напряжение при угле поворота ф
Таким образом, один элемент находится точно напротив впадины между зубцами, в то время как другой — напротив зубца. Датчик измеряет разницу силы полей в двух точках, тесно соседствующих по вписанному направлению. Выходной сигнал соответствует отклонению силы поля по вписанному углу и его знак не зависит от воздушного зазора. Изменения воздушного зазора не вызывают неотработанных импульсов, поскольку они не изменяют знак градиентного сигнала.
Для определения сигнала оба магниторезисторных сопротивления можно подключить к одному потенциометру, который запитан от постоянного напряжения и выходной сигнал которого считывается без нагрузки прибора управления. Этот сигнал при комнатной температуре и обычных воздушных зазорах находится в диапазоне вольт, но даже при высоких температурах не настолько велик, чтобы его можно было передать на прибор управления без использования предварительного усилителя.
Если вместо напряжения холостого хода считывается его выходной ток, который течет под нагрузкой, то при определенных конструкционных условиях экстремальная температурная характеристика компенсируется чувствительностью измерительного устройства.
Касательно градиентного зонда на основе Холла токопроводящие дорожки могут последовательно соединяться: обоих элементов Холла — параллельно, а их выходных напряжений — встречно, чтобы можно было бы снять непосредственно разницу их напряжений и подать на последовательно подключенные уровни усиления и обработки.
Тангенциальные датчики
В отличие от градиентных датчиков, тангенциальные датчики реагируют на знак и интенсивность компонентов магнитного поля, тангенциальных относительно длины окружности ротора. Они могут быть исполнены по тонкослойной анизотропной магниторезистивной (AMR) технологии в виде полюсов «шлагбаума», либо как простые сопротивления из сплава пермаллой в схеме полного моста или полумоста (рис. 9). В отличие от градиентных датчиков их невозможно согласовать с шагом зубцов, они могут быть выполнены точечно. Им требуется усиление по месту использования, если их измерительный эффект превышает эффект кремниевых датчиков на 1-2 порядка.
Если речь идет об интегрированном в подшипник датчике скорости вращения кулачкового вала (модуль радиального уплотнения), тонкослойный датчик АМР монтируется вместе с интегральной микросхемой на общей рамке с внешними выводами.
В целях экономии места и защиты от воздействия температуры интегральную микросхему выгибают на 90° и устанавливают подальше от наконечника датчика.
Ультравысокие магниторезистивные элементы (GMR)
Эффект «Ультравысокого магнитного сопротивления» («Giant Magneto Resistance») (эффект GMR) вначале был определен на мультислоях, которые состояли из тонких магнитомягких и немагнитных слоев попеременно (толщина несколько нанометров). Антипараллельное направление намагничивания соседних ферромагнитных слоев приводит к максимальному электрическому сопротивлению, в то время как параллельное направление демонстрирует значительно меньшее сопротивление.
Относительное изменение сопротивления для применяемых структур слоев находится в диапазоне 20...30%. В сравнении с анизотропным магниторезистивным эффектом это означает увеличение примерно в 10 раз.

Рисунок 9. Датчик скорости вращения АМР в качестве зонда тангенциального поля. 1. Зубчатое колесо (Fe); 2. Постоянный магнит; 3. Датчик; В. Сила управляющего поля с тангенциальными компонентами Bt и радиальными компонентами ВГ (В' состояние покоя, Bt=0), R1, R2 тонкослойные сопротивления из пермаллой (AMR); φ. Угол поворота; UO. Напряжение питания; UA. Измерительное напряжение
Простейшая система слоев, демонстрирующая эффект GMR, — это спин-клапан (см. раздел «Датчики положения»). Он состоит из двух магнитомягких слоев, разделенных немагнитным слоем. В то время когда намагничивание одного магнитомягкого слоя фиксируется антиферромагнитом, намагничивание второго магнитомягкого слоя может идеально следовать за внешним полем (free layer). Сопротивление минимально тогда, когда намагничивание обоих слоев направлено параллельно, и повышено на 5%, когда намагничивание направлено антипараллельно. С помощью искусственного антиферромагнита (SAF), состоящего из ферромагнитных слоев, соединенных друг с другом антиферромагнитно с помощью тонкого немагнитного промежуточного слоя, можно дополнительно минимизировать взаимодействие эталонного намагничивания внешним полем (рис. 10). За счет этого значительно повысится устойчивость к воздействию полей помех.
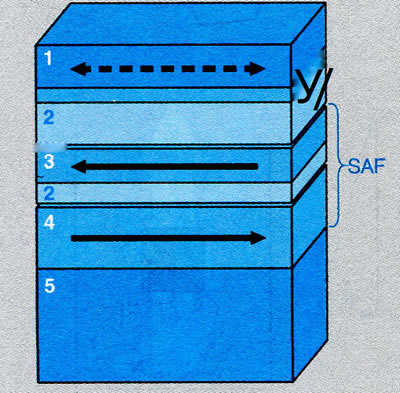
Рисунок 10. Слои спин-клапана GMR. 1. Свободный слой; 2. Промежуточный слой; 3. Эталонный слой; 4. Фиксированный слой; 5. Атиферромагнит; SAF. Искусственный антиферромагнит
Типичная графическая характеристика спин-клапана изображена на рис. 11. Четко различают два характерных состояния для обоих противоположных направлений внешнего магнитного поля. В области перехода высокого напряжения в низкое спин-клапан чувствителен к изменениям силы поля.
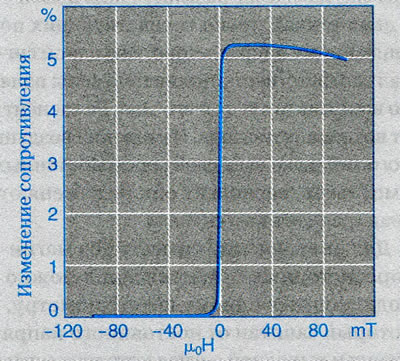
Рисунок 11. Графическая характеристика спин-клапана
Для определения числа оборотов подходит схема мостов, состоящая из четырех GMR-элементов сопротивлений, выполненных в виде градиометра (рис. 12). При этом сопротивления подключены таким образом, что сигнал генерируется только разницей магнитных полей на обоих мостах.
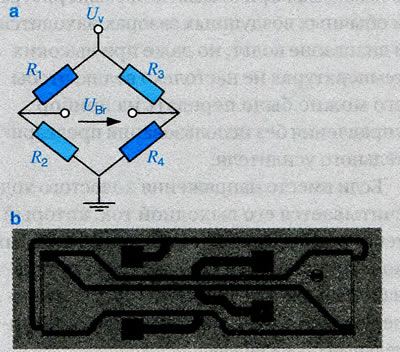
Рисунок 12. Схема мостов, датчик GMR. а. Электросхема; b. Эскиз радиометрического датчика
Благодаря этому можно подавить эффекты однородных полей помех. Поскольку эталонное направление для всех сопротивлений равное, нет необходимости в локальном нагреве в магнитном поле, как это было необходимо для вписывания различных эталонных направлений намагничивания при одном угломере.
Максимальная амплитуда сигнала градиометрического датчика создается тогда, когда направление поля на обоих мостах смещено по фазам точно на 180°. В случае с многополюсным индуктором это происходит тогда, когда, расстояние элементов сопротивлений соответствует расстоянию между полюсами многополюсного кольца (рис. 13).

Рисунок 13. Измерение числа оборотов с помощью датчика GMR. Линии полей во внешнем пространстве многополюсного кольца. Оба квадрата символизируют оба моста. Стрелки указывают направление линий полей в этих точках
Примеры применения:
- Датчик Холла (транзисторное зажигание TZ-H).
- Датчик Холла положения распределительного вала (кулачковый вал).
- Датчик Холла для привода (RS50, RS51).
- Активный датчик Холла частоты вращения.
- Активный датчик частоты вращения АМР.
- Магниторезисторный датчик (для дизельного распределительного ТНВД и насоса радиально-поршневого двигателя).
- Активный датчик частоты вращения GMR.
Абсолютное измерение скорости вращения
Принцип измерения колебательного гирометра
Основания
Механические гироскопы (англ.: Gyroscope или Gyro) используют силы инерции, чтобы независимо от систем координат выполнять очень точные измерения в области угловых движений. Как вращающиеся гироскопы, так и оптические датчики на основе интерферометрически действующего эффекта Саньяка (лазерные и волокнистые гироскопы) из-за высокой стоимости не рассматриваются как подходящие для применения в автомобильных системах, несмотря на ярко выраженный измерительный эффект.
Менее точные измерения по сравнению с вышеуказанными датчиками для автомобильной техники способны выполнять гироскопы, изготовленные микромеханическим способом, которые вместо ротационного движения используют только эквивалентное эластичное колебательное движение для создания измерительного эффекта. Эти датчики по принципу действия подобны механическим гироскопам. При этом они используют для измерения ускорения Кориолиса, возникающего при вращательных движениях в сочетании с колебательным движением (скорость v) (рис. 14). Эти датчики, называемые колебательными гироскопами (англ.: vibrating gyros), применяются в электронной стабилизирующей программе (ESP) для распознавания отказа в работе автомобиля, в навигационных системах для определения направления движения и в камерах для стабилизации картинки, чтобы она не смазывалась.
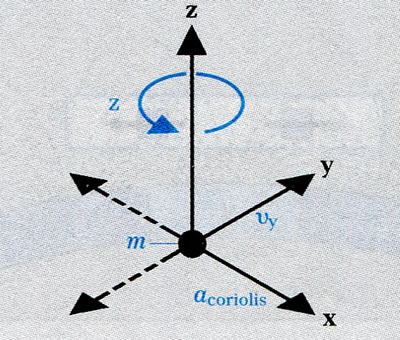
Рисунок 14. Связи при вращательном движении. Связь между угловой скоростью рыскания, колебательным движением и ускорением Кориолиса в точечной массе m. Qz. Угловая скорость рыскания; vу. Скорость колебательного движения; OCoriolis. Ускорение Кориолиса; m. Точечная масса
Они отвечают всем требованиям автомобильной промышленности, таким как, например, отсутствие профилактики, длительный срок службы, постоянное время включения и пр., включая расчеты по стоимости.
Колебательные гирометры измеряют угловую скорость рыскания вокруг своей «чувствительной оси». В электронной стабилизирующей программе (ESP) и в навигационных системах они измеряют угловую скорость рыскания Qz вокруг оси автомобиля (угловой оси). Системы для приведения в действие защиты от опрокидывания требуют определения угловых скоростей Qx и Qy вокруг оси крена и поперечной оси автомобиля.
Измерение ускорения Кориолиса
Колебательные гирометры измеряют ускорение Кориолиса следующим образом: если увеличить расстояние массы относительно оси вращения, то она должна за время одного оборота пройти большее расстояние из-за большего радиуса. Окружность увеличивается с увеличением радиуса. Таким образом, масса должна приобрести более высокую тангенциальную скорость и для этого ускориться. Для измерения этого ускорения (ускорение Кориолиса) масса амортизационно подвешивается и осуществляется измерение изгиба подвески. Если расстояние от массы до угловой оси уменьшается — при более высокой тангенциальной скорости — масса должна замедляться, поскольку за оборот будет пройдено меньшее расстояние. Необходимое тормозное ускорение также измеряется по изгибу подвески.
В колебательных гирометрах расстояние от одной (или нескольких) массы (масс) до угловой оси вращения периодически увеличивается и снова уменьшается за счет колебательного возбуждения (рис. 14, движение в у-направлении). За счет этого масса должна ускоряться с таким же тактом и снова затормаживаться (движение х-направлении). Необходимые для этого силы зависят от амплитуды колебательного возбуждения и фактической угловой скорости рыскания. Если колебательное возбуждение поддерживается постоянным, по скорости ускорения можно определить угловую скорость рыскания Q.
Сила Кориолиса согласно известному векторному закону действует вертикально относительно вращательного движения и скорости движущейся массы (рис. 14). Отсюда следует ускорение Кориолиса:
(1) aCoriolis = ax = 2·vу · x · Ωz
Скорость vу изменяется при этом синусоидально соответственно скорости колебаний:
(2) vу = vy · sinωt
При этом при постоянной угловой скорости рыскания Qz измеряется также синусоидальное ускорение Кориолиса acorioiis такой же частоты. Значение амплитуды получается:
(3) aCoriolis = 2 · vу · Ωz
Воздействующее на массу т ускорение ау в направлении колебаний по значению обычно выше на несколько десятичных порядков, чем полезное ускорение Кориолиса:
(4) ay = dvу / dt = ω · vу · sinωt
Поскольку ускорение Кориолиса имеет такую же частоту, что и функция возбуждения, полезный сигнал (угловая скорость рыскания) может быть получен путем умножения сигнала возбуждения и сигнала Кориолиса на конечное усредненное значение (выпрямление в соответствии с фазами). Сигналы помех других частот при этом отфильтровываются (принцип синхронизируемого усилителя). Формирование усредненного значения (с помощью фильтра нижних частот) освобождает выходной сигнал от возбуждающей частоты. Создается выходное напряжение, которое является пропорциональным угловой скорости рыскания:
(5) UA = const · аCoriolis = const · Ω
Примеры, применения:
- Пьезоэлектрические датчики угловой скорости рыскания.
- Микромеханические датчики угловой скорости рыскания.