
Характеристики
Датчики положения определяют одномерные или многомерные положения движения и угловые положения (линейные и угловые величины) различного вида и в различных диапазонах. К таковым относятся расстояния, дистанции, смещения (англ.: displacement), уровень заполнения и даже минимальные растяжения — т.е. все величины, которые можно измерить в метрах и градусах.
В этой сфере уже давно существует стремление к переходу на использование бесконтактных датчиков, которые не подвержены износу и поэтому более долговечны и надежны. Однако вопрос затрат все-таки вынуждает использовать старые принципы работы датчиков, поскольку для большинства измерений они вполне справляются со своими задачами.
Величины положений относятся к «экстенсивным измерительным величинам», при измерении которых измерительная величина или диапазон измерений в значительной степени определяют величину датчика (для сравнения: «интенсивные измерительные величины» — например, например давление и температура). Поэтому датчики для измерения экстенсивных величин среднего и большого диапазона (например, датчики расхода и усилия) менее приспособлены к миниатюризации и, соответственно, экономичному массовому производству. Поскольку данное правило в меньшей степени распространяется на датчики поворота (угла), чем на датчики скорости (движения) (величина угла не зависит от радиуса или длины колена), первые чаще используются в автомобиле.
В случае с экстенсивными величинами в большом диапазоне измерений часто сначала все-таки преобразуются в интенсивные величины, которые можно измерить с помощью микродатчиков. Таким образом, при измерении расхода осуществляется переход на измерение плотности расхода (потока) (измерение парциальной плотности потока, например 1:100), при этом трубопровод потока становится существенной составляющей датчика, без которой датчик не может быть протестирован и калиброван.
В датчиках скорости и расстояния большого диапазона измерений (ок. 0,1...50 м) измерительная величина преобразуется с помощью датчиков распространения волн (звуковые и электромагнитные волны) в задержку по импульсу или фазе, которые можно легко измерить электронным способом с помощью сравнительно маленьких излучающих / приемных устройств. В случае со звуковыми волнами важным компонентом измерительного устройства является среда распространения сигнала (например, воздух), а также необходимый эталон времени (например, пьезоэлетрический резонатор).
Обзор измерительных величин
Обзор измерительных величин Существует большое количество сфер применения, в которых положения являются истинными непосредственными измерительными величинами. Это отображено в таблице 1 в перечне. В других случаях измеренное положение пути/угла представляет другую измерительную величину (таблица 2).
Таблица 1. Положения движения и поворота как непосредственные измерительные величины
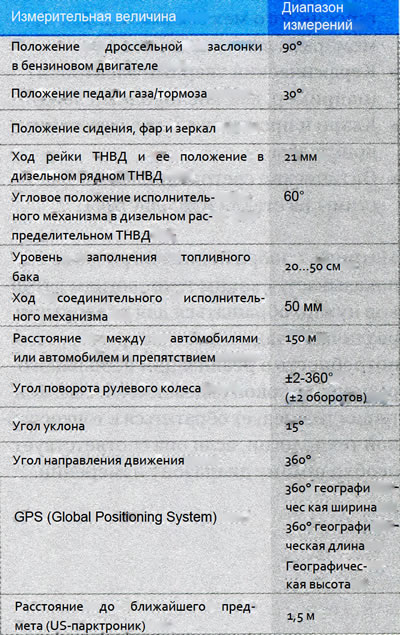
Таблица 2. Положения движения и поворота как непрямые измерительные величины
На практике часто «инкрементальные системы датчиков» обозначают как угловые датчики, так как они, прежде всего, используются для измерения числа оборотов. Они не являются угловыми датчиками в истинном понимании. Однако для измерения угла поворота приращения (суммы, на которые увеличивается величина), измеряемые с помощью этих датчиков, должны рассчитываться со знаком плюс, т.е. суммироваться. Такие системы измерения углов применяются в ограниченном количестве, поскольку показание счетчика может постоянно фальсифицироваться из-за импульсных помех. Жесткие, определяемые (устанавливаемые) опорные сигналы в данном вынужденном положении могут помочь только частично. В таких системах измерения угла абсолютное положение при отключении рабочего напряжения утрачивается. Здесь не поможет также энергонезависимое сохранение конечного состояния, поскольку большинство угловых положений может механически изменяться в отключенном состоянии (например, угол поворота рулевого колеса).
Хотя угол коленчатого вала измеряется с приращением, это измерение после каждого поворота заново юстируется опорным сигналом, определяемым датчиком, если ожидается появление помехи (неполадки). Здесь приходится также считаться с тем, что при запуске двигателя неизвестно, в каком положении находится коленчатый вал; он должен с помощью стартера сделать только один полный оборот, чтобы сгенерировался хотя бы один опорный сигнал. Движение коленчатого вала очень монотонное, т.е. оно почти всегда достаточно однообразное (без скачков) только в одном направлении (практически всегда вперед, никогда назад). Поэтому можно с уверенностью сказать, что практически любой оборот покажет правильный результат.
При мгновенном старте двигателя без стартера нельзя допускать появления дефектов приращенного измерения угла — также как и при угле поворота рулевого колеса. Здесь требуется датчик абсолютного угла для диапазона в 360°.
Потенциометрические датчики
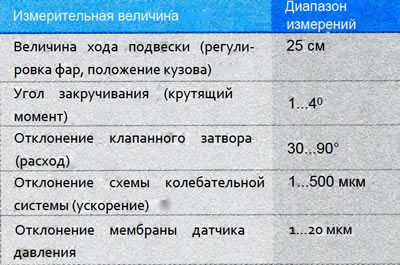
Шлейфовый потенциометр — чаще конструируемый как угловой датчик (рисунок 1) — использует соответствие между длиной провода — или пленочным резистором (из «Cermet» или «Conductive Plastic») для своего электрического параметра сопротивления в измерительных целях.
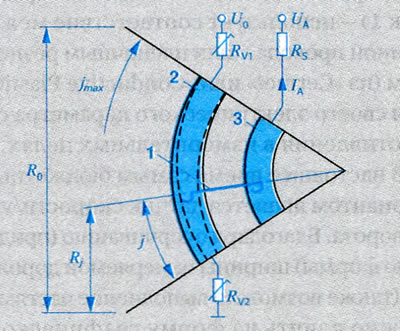
Рисунок 1. Принцип шлейфового потенциометра. 1. Скользящий контакт; 2. Резистивная дорожка; 3. Путь перемещения контакта; Iа. Ток скользящего контакта; Uо. Напряжение питания; UA. Измеряемое напряжение; R. Сопротивление; φmax. Максимальный угол поворота; φ. Угол измерения
В настоящее время самым бюджетным вариантом является датчик скорости/угла поворота. Благодаря очерчиванию (приданию формы) ширины измеряемой дорожки (также возможно выполнение частями) можно влиять на форму графической характеристики. Подключение скользящего контакта осуществляется зачастую с помощью второй контактной дорожки с такой же поверхностью, под которой, однако, проложен проводниковый материал с низким электрическим сопротивлением. Для защиты от перегрузки в большинстве случаев напряжение питания подается на измерительную дорожку через меньшие предварительные сопротивления RV (также для обнуления и коррекции уклона).
Износ и искажение измерительных характеристик можно уменьшить за счет минимально нагруженного отвода (IA≤1 мА) и заключения в пыле- и водонепроницаемую капсулу. Условием меньшего износа является также подбор скользящего контакта и дорожки, обеспечивающий оптимальное трение; при этом скользящие контакты могут иметь форму «ложки» или «скребка», быть одинарными или сложносоставными, и даже иметь форму «веника».
Однако целому ряду значительных преимуществ, противопоставлено большое количество серьезных недостатков.
Преимущества потенциометрических датчиков:
- Низкие затраты;
- простая, наглядная конструкция;
- большая измерительная эффективность (измерительный прогон = напряжение питания);
- нет необходимости в электронике;
- хорошее противостояние напряжению помех;
- широкий диапазон рабочих температур (≤ 250°С);
- высокая точность (на 1% лучше конечного параметра измерительного диапазона);
- широкий диапазон измерений (возможно почти на 360°);
- беспроблемный ввод дублеров;
- корректируемость (лазерная абляция и пр.);
- гибкая графическая характеристика (изменяемая ширина дорожки);
- гибкий монтаж (ровная или искривленная поверхность);
- большое количество производителей;
- быстрый отбор образцов.
Недостатки потенциометрических датчиков:
- Механический износ из-за истирания;
- погрешности в измерениях из-за следов истирания;
- проблемы при работе в жидкостях;
- переходное сопротивление, изменяющееся от скользящего контакта к измерительной дорожке;
- отсоединение скользящего контакта при сильном ускорении или вибрации;
- сложные испытания;
- ограниченные возможности выполнения в миниатюрной форме;
- помехи (шум).
Применение
Примеры потенциометрических датчиков:
- датчик педали газа или модуль педали газа для определения желаемого момента поворота для управления двигателем;
- датчик уровня заполнения топливного бака (рис. 2);
- потенциометр порога гидродинамической муфты (КЕ- и L-Jetronic) для определения объема воздуха, который всосал двигатель;
- датчик угла дроссельной заслонки для определения ее положения в бензиновых двигателях (рисунки 3...5).
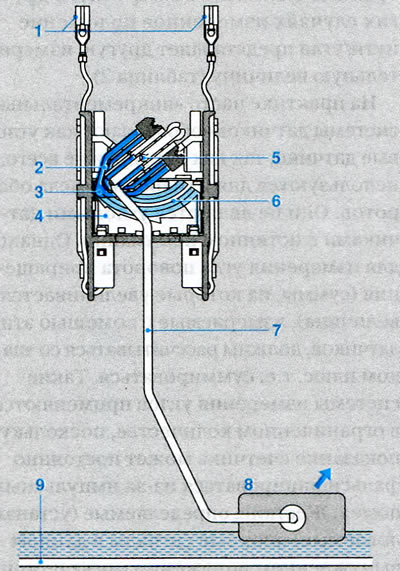
Рисунок 2. Потенциометрический датчик уровня заполнения топливного бака. 1. Электрические подключения; 2. Поля контактов скольжения; 3. Контактная заклепка; 4. Плата сопротивления; 5. Штифт подшипника; 6. Двойной контакт; 7. Рычаг поплавка; 8. Поплавок; 9. Дно топливного бака
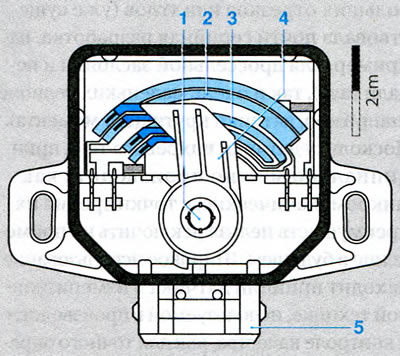
Рисунок 3. Датчик дроссельной заслонки (конструкция). 1. Вал дроссельной заслонки; 2. дорожка сопротивления 1; 3. дорожка сопротивления 2; 4. Цапфа скользящего контакта со скользящими контактами; 5. Электроподключение
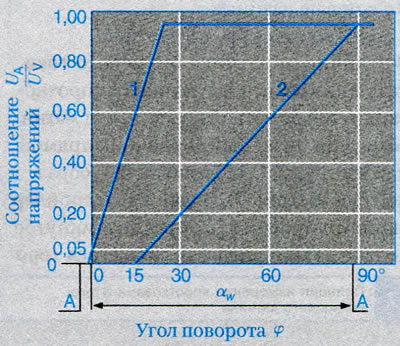
Рисунок 4. Датчик дроссельной заслонки с двумя графическими характеристиками. А. Внутренний ограничитель хода; 1. Графическая характеристика для высокого разрешения в угловом диапазоне 0°...23°; 2. Графическая характеристика в угловом диапазоне 15°...88°; UA. Измеряемое напряжение; UV. Рабочее напряжение; αW. Полезный угол измерения
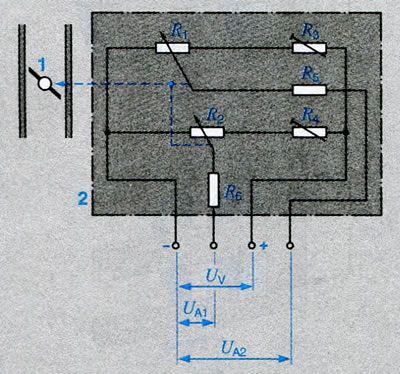
Рисунок 5. Датчик дроссельной заслонки (переключение). 1. Дроссельный клапан; 2. Датчик дроссельной заслонки; UA. Измеряемые напряжения; UV. Рабочее напряжение; R1, R2. Дорожки сопротивления 1 и 2; R3, R4. Выранивающее сопротивление; R5, R6. Защитные ре-зиторы
Магнитно-индуктивные датчики
Из всех датчиков, которые выполняют измерение положения бесконтактно, магнитные датчики являются самыми чувствительными к помехам и прочными. Это касается в первую очередь датчиков, работающих на основе переменного тока, т.е. магнитной индукции. Необходимые для этого способы расположения катушек нуждаются в наличии большего места в сравнении с микромеханическими датчиками, т.е. возможность установки дублирующих датчиков (осуществляющих измерения параллельно) отсутствует. Кроме того, необходимый контакт с катушкой является фактором, отрицательно влияющим на затраты! и надежность.
Из большого числа известных устройств такого типа в автомобиле в основном используются два из них, которые имеют очень похожий принцип действия. Однако в настоящее время они не применяются в макромеханическом исполнении в сфере производства автомобильных датчиков в новых разработках компании «Bosch».
Датчики вихревого тока
Если электропроводящая, ровная или искривленная мембрана (пластина) (например, из алюминия или меди) приближается к катушке, запитанной высокочастотным вихревым током (обычно не содержащей железа) (рис. 6), это влияет как на ее активное сопротивление, так и на ее индуктивность. Причиной этого становятся вихревые токи, возникающие в демпферной пластине (спойлере) из-за возрастающего магнитного взаимодействия. Положение этой демпферной пластины отражает отрезок измерений s.
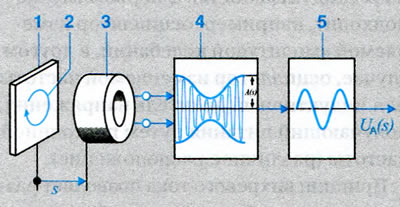
Рисунок 6. Принцип демпфирования и вихревого тока HF. 1. Диск амортизатора; 2. Вихревые токи; 3. Воздушная катушка; 4. Автогенератор различной амортизации; 5. Демодулятор; s. Измеряемый путь; A(s). Напряжение генератора; UA(s). Выходное напряжение
В целом высокая рабочая частота (диапазон MHz, низкочастотное питание поглощало бы слишком много электротока из-за низкой индуктивности катушки) требует прямого подчинения электроники датчику или экранированного соединения — часто даже переносного. Для преобразования измерительного эффекта в электрическое выходное напряжение может использоваться также эффект демпфирования (эффективное сопротивление) и эффект замещения поля (индуктивность). В первом случае подходит, например, осциллятор изменяемой амплитудой колебаний, в другом случае, осциллятор изменяемой частоты или индуктивный делитель напряжения, получающий питания путем постоянной частоты (различное расположение).
Принцип вихревого тока позволяет различными способами приспосабливаться к задаче по выполнению измерений. Он хорошо подходит как для определения больших отрезков или углов (уже существовала почти серийная разработка, например, для дроссельной заслонки и педали газа), так и очень маленьких величин (например, датчики крутящего момента). Поскольку датчики вихревого тока принципиально можно производить как микромеханические, с точки зрения их преимуществ нельзя исключить их применение в будущем. Широкое использование находит принцип датчика в измерительной технике, используемой в производстве и контроле качества, как для точного определения малых отрезков/расстояний, так и для толщины слоев в диапазоне мкм.
Кольцевые датчики с короткозамкнутой обмоткой
В отличие от датчика вихревого тока катушка кольцевого датчика с короткозамкнутой обмоткой всегда имеет магнитомягкий, луженый сердечник прямой или изогнутой U-образной или Е-образ-ной формы (рис. 7). Подвижный спойлер сконструирован как короткозамкнутое кольцо из материала, являющегося хорошим проводником, например, меди или алюминия, который подвижно расположен на одной или всех цапфах сердечника. Благодаря железному сердечнику такие датчики обладают большей индуктивностью, чем датчики вихревого тока и более высокой эффективностью измерений из-за очень концентрированной проводимости магнитного потока железным сердечником. Таким образом, они могут работать при низких частотах и не обязательно нуждаются в сигнальной электронике в месте расположения на датчике. Железный сердечник защищает измерительное пространство между цапфами сердечника от внешних полей помех.
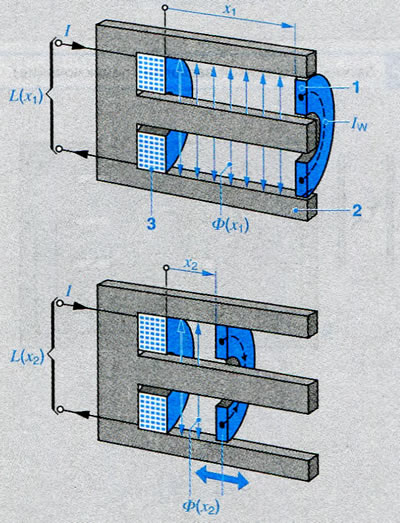
Рисунок 7. Принцип измерения короткозамкнутого кольцевого датчика. Изображение двух различных измеряемых отрезков. 1. Короткозамкнутое кольцо; 2. Магнитомягкий сердечник; 3. Катушка; I. Ток; IW. Вихревой ток; L(s) индуктивность и Ф(s) магнитный поток при измеряемом отрезке s
В переменное поле, которое создает ток катушки в железном сердечнике и вокруг него, невозможно проникнуть через короткозамкнутое кольцо, поскольку вихревые токи компенсируются в короткозамкнутом кольце практически до нуля. Вихревые токи в короткозамкнутом кольце выступают таким образом — как «магнитный изолятор» — распространение магнитного потока Ф пространством между катушкой и короткозамкнутым кольцом (отсюда англ: shading ring) и делают его зависимым от положения х короткозамкнутого кольца, Ф = Ф (х).
Индуктивность определяется как:
(1) L = Ф/I
Поэтому положение х короткозамкнутого кольца оказывает непосредственное влияние на индуктивность L катушки обмотки возбуждения. Взаимосвязь L = L(x) в широком диапазоне явятся положительно линейной. Для измерения можно использовать почти всю длину датчика. При этом не требуется механической узкой направляющей короткозамкнутого кольца.
Масса короткозамкнутого кольца, которое следует передвигать, очень мала. Создание очертаний (придание формы) расстояния между цапфами влияет на форму графической характеристики: сужение расстояния от цапфы до конца измерительного диапазона улучшает заданную хорошую линейность. В зависимости от материала и конструкции чаще всего эксплуатация осуществляется в диапазоне 5...50 кГц. Датчик используется также в самых жестких условиях эксплуатации, например, в дизельных топливных насосах (рисунок 8, 9).
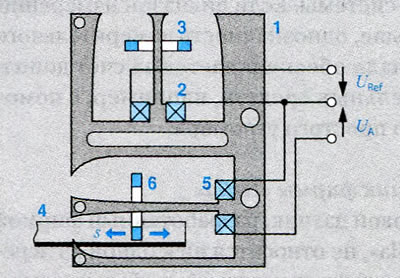
Рисунок 8. Полудифференциальный датчик короткозамкнутого кольца. Конструкция датчика хода рейки ТНВД для серийных дизельных топливных насосов. 1. Магнитомягкий сердечник; 2. Эталонная катушка (L2); 3. Эталонное короткозамкнутое кольцо; 4. Рейка ТНВД; 5. Измерительная катушка (L1); 6. Измерительное короткозамкнутое кольцо; S. Ход рейки ТНВД
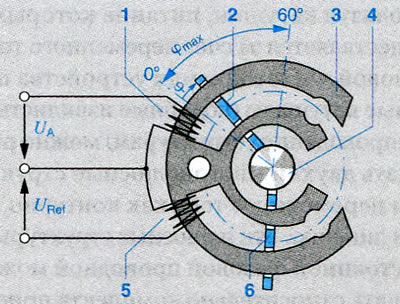
Рисунок 9. Полудифференциоальный короткозамкнутый кольцевой угловой датчик. Конструкция углового датчика в исполнительном механизме дизельных распределительных ТНВД. 1. Измерительная катушка; 2. Измерительное короткозамкнутое кольцо; 3. Магнитомягкий сердечник; 4. Вал регулирующей заслонки; 5. Эталонная катушка; 6. Эталонное короткозамкнутое кольцо; φ. Угол измерения; φmax. Область угла опережения зажигания вала регулирующей заслонки
Из-за режима работы в переменном токе сердечники луженые (например, NiFe-лужение, 0,2 мм толщина). Для получения нужной механической стабильности, которая удерживает щитки в устойчивом к ускорению состоянии, они не только склеиваются обычным способом, но и дополнительно «перфорируются». Для этой цели на щитках в определенных местах делаются утолщения, с помощью которых они еще до мягкого отжига соединяются изнутри (как в конструкторе ЛЕГО), не разрушая при этом электроизоляцию между щитками.
Полудифференциальный кольцевой датчик с короткозамкнутой обмоткой с подвижным измерительным и эталонным жестким короткозамкнутым кольцом является очень точным; он выполняет анализ данных как индуктивный делитель напряжения (анализ данных индуктивности L1/L2, или (L1-L2)/(L1+L2) или как член генераторной схемы, определяющий частоту, в целях создания частотно-аналогового сигнала (прекрасно защищен от помех, легко оцифровывается).
Рисунок 9 отображает конструкцию полудифференциального кольцевого датчика с короткозамкнутой обмоткой (КДКО) для дизельных распределительных ТНВД. На каждой цапфе сердечника крепятся одна измерительная катушка и одна эталонная катушка. Если по катушкам проходит электрический переменный ток, исходящий от прибора управления, образуются переменные поля. Эталонное короткозамкнутое кольцо неподвижно, в то время как измерительное короткозамкнутое кольцо закреплено на вале регулирующей заслонки (угол опережения зажигания (φ). При смещении измерительного короткозамкнутого кольца изменяется магнитный поток, а вместе с ним и напряжение на катушке, поскольку прибор управления поддерживает постоянный ток (подводимый ток). Переключатель, обрабатывающий сигналы, формирует соотношение выходного напряжения U на измерительной индуктивности L1 к эталонному напряжению URef на эталонной индуктивности L2. Оно пропорционально отклонению измерительного короткозамкнутого кольца и может анализироваться прибором управления.
Датчики с вращающимися переменными полями
Используя катушки, питание которых осуществляется за счет переменного тока с угловой частотой со или устройства подобные катушкам (подобные извилистым токопроводящим структурам) можно размещать двух- и многополюсные структуры переменного тока как контурно, так и линейно. Эти полюсные структуры с постоянной фазовой проводкой можно смещать относительно комплекта приемных катушек, чаще всего стационарных, имеющих одинаковую фазовую проводку, за счет движения измеряемой системы — будь то роторная или трансляционная система. При этом во время движения амплитуды поступающих сигналов изменяются по синусоиде. Если приемные катушки перемещаются на определенную часть проводки Т относительно друг друга (например, Т/4 или Т/3), то синусоида смещается по фазе на соответствующий угол (например, на 90° или 120°). Таким образом создаются напряжения, например:
(1) u1 = U·sinφ·sinωt
(2) u2 = U·sin(φ - 90°)·sinωt = U·cosφ·sinωt
или также:
(3) u1 = U·sinφ
(4) u1 = U·sin(φ - 120°)·sinωt
(5) u1 = U·sin(φ - 240°)·sinωt
После выпрямления на основании этих напряжений можно очень точно рассчитать угол поворота а. Так работают датчики, описанные в классической измерительной технологии как датчики, использующие методы синхронизации, резольвера и индуктосина и преимущественно являющиеся угломерными датчиками.
При простом биполярном расположении механическому углу поворота α соответствует также непосредственно электрический фазовый угол. При использовании π объединенных пар механический полный угол φф=2π преобразуется в смещение фаз α=n·2π, так что смещение фазы α соответствует углу поворота только φ/n, что значительно увеличивает разрешение измерительной системы. Если диапазон измерений больше, однозначность измерительного сигнала обеспечивается за счет дополнительных средств, например, с помощью простого угломера.
Датчик фирмы «Hella»
Угловой датчик, разработанный фирмой «Hella», не относится ни к одной из перечисленных технологий, но больше всего похож на индуктосинный датчик. На рисунке 10 изображен датчик, например, с 6-значной полюсной структурой (n=6), который с электрической точки зрения преобразует угол поворота φ=60° в смещение фазы амплитуды светового сигнализатора α=360°. Все необходимые структуры токопроводящих дорожек нанесены на многослойный материал токопроводящей пластины в стационарном статоре. Роторная часть может быть также выполнена в форме штампованной детали, свободнонесущей или закрепленной на пластиковом носителе (путем горячей штамповки).
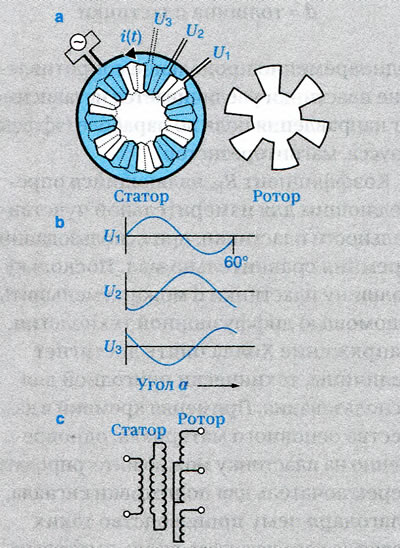
Рисунок 10. Датчик фирмы «Hella». а. Схематическая конструкция; b. Монтаж (проводка); с. Выходные сигналы
На статоре находится круглая спираль с токопроводящими дорожками, которая наводит вихревой ток в зависимости от угла поворота в меандровую спираль, замыкающуюся в себе, имеющую такой же наружный диаметр и рабочую частоту 20 МГц. Такой вихревой ток, естественно, вырабатывает, так же как и спираль возбуждения, вторичное магнитное поле, которое накладывается на поле возбуждения в таком виде, что пытается погасить была бы только одна равная круглая токопроводящая дорожка, сравнимая со спиралью статора, то она бы просто полностью гасила первичное поле. Однако за счет меандровой структуры в результате возникает многополюсное поле, которое позволяет осуществлять вращение вместе с ротором, и весь его поток магнитной индукции почти равен нулю.
Это многополюсное переменное поле считывается концентрическими приемными катушками или меандрами, находящимися на статоре. Они смещаются в ходе полюсного шага (например, 60°) на, соответственно, 1/3, т.е. электрически в их сигнальной амплитуде на 120° за шаг (рис. 10b)
Приемные катушки распространяются через все n полюсных пар (серийное подключение) и используют сумму всех полюсных полей.
Согласно рисунку 10с приемные катушки соединены в звезду. Их сигналы для определения электрического фазового угла а или механического угла поворота φ подводятся ASIC, который осуществляет необходимое (правильное) выпрямление, отбор и формирование соотношения. Версия ASIC 1 получает необходимые для этого цифровые сигналы управления от микроконтроллера, расположенного в непосредственной близости. Другая версия ASIC 2 имеет возможность полностью независимо (stand-alone) использовать датчик. ASICS позволяют совершать в ходе изготовления конечную корректировку механических и электрических допусков. Для использования при повышенных требованиях к мерам безопасности существует возможность создания дублирующей системы с двумя гальванически разделенными цепочками сигналов и двумя ASIC. Принцип действия датчика можно описать в «разрезе» как принцип датчика скорости.
Наряду с незначительными затратами на производство основными преимуществами этого датчика являются:
- контакт и не вызывающий износа принцип осуществления измерений;
- полная независимость от температуры (до 150°С);
- высокая точность (при диапазоне измерений от 360° до±0,09°);
- гибкость (согласуется со всеми угловыми диапазонами до 360°);
- возможность создания дублирующей конструкции;
- высокая ЭМС-безопасность;
- исключительное использование стандартных материалов без необходимости применения ферромагнитных деталей;
- плоская конструкция.
По этим причинам датчик можно использовать в автомобиле в большом количестве мест.
Магнитостатические датчики
Магнитостатические датчики измеряют магнитное поле постоянного тока. В отличие от магнитных индуктивных (катушечных) датчиков они лучше подходят для миниатюризации и экономично производятся с помощью средств микросистемной технологии. Поскольку поля постоянного тока легко проникают через стенки корпуса из пластика, а не из ферромагнитного металла, преимущество магнитостатических датчиков состоит в том, что стационарную деталь можно хорошо защитить от вращающегося проводника с помощью капсулы — обычно постоянного магнита или магнитомягкого проводника — а также от воздействий окружающей среды. В первую очередь используются гальваномагнитные эффекты (эффект Холла и Гаусса) а также магниторезистивные эффекты (AMR и GMR).
Гальваномагнитные эффекты
Эффект Холла определяется прежде всего с помощью полупроводниковых пластин. Если через такую пластинку, по которой проходит ток, вертикально пропустить магнитную индукцию В, то носители заряда будут отклоняться от прямого пути за счет силы Лоренца вертикально по отношению к полю и к току I на угол ф (рис. 11). Таким образом перпендикулярно направлению тока между двумя крайними противоположными точками пластинки пропорциональное напряжение UH будет сниматься напряжение, пропорциональное полю В и току I (эффект Холла):
(2) UH = RH · I · B / d
RH = коэффициент Холла, d = толщина пластинки
Одновременно продольное сопротивление пластинки увеличивается независимо от направления поля по параболе (эффект Гаусса, магниторезистор).
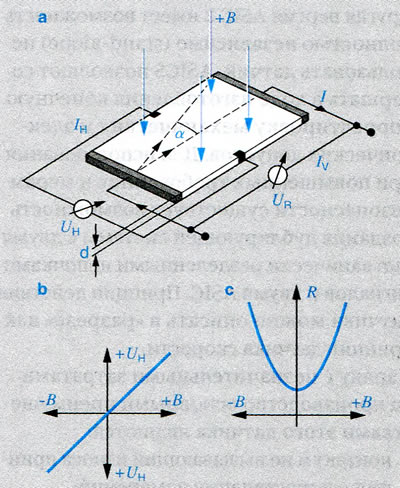
Рисунок 11. Гальваномагнитные эффекты. а. Схема; b. Процесс создания напряжения Холла UH; с. Рост сопротивления пластинки R (эффект Гауса); В. Магнитная индукция; I. Ток пластинки; IH. Ток Холла; IV. Питающий ток; UR. Продольное напряжение; α. Отклонение электронов за счет магнитного поля
Коэффициент RH, являющийся определяющим для измерительной чувствительности пластинки, при использовании кремния сравнительно мал. Поскольку толщину пластинки d можно уменьшить с помощью диффузионной технологии, напряжение Холла опять достигнет величины, технически пригодной для использования. Применяя кремний в качестве основного материала, одновременно на пластинку можно интегрировать переключатель для подготовки сигнала, благодаря чему производство таких датчиков может стать очень выгодным.
В отношении измерительной чувствительности и температурного режима кремний является далеко не самым подходящим полупроводниковым материалом для производства датчиков Холла. Лучшими характеристиками обладают, например, полупроводники III-V, такие как арсенид галлия или антимонид индия.
Переключатель Холла
В самом простом случае напряжение Холла подается на пороговую электронику, интегрированную в датчик (Schmitt -Trigger), которая производит цифровой выходной сигнал. Если магнитная индукция В, существующая на датчике, находится ниже определенного нижнего порогового параметра, то выходное значение соответствует, например, логическому «О» («release»-состояние); если оно выше определенного верхнего порогового параметра, то выходной сигнал соответствует логической «1» («operate»-состояние). Поскольку такой процесс гарантирован для всего диапазона рабочей температуры и для всех экземпляров одного типа, оба пороговых значения относительно далеки друг от друга (ок. 50 ΔВ). Поэтому для включения переключателя Холла требуется значительный индукционный ход АВ.
Такие датчики, производимые еще по биполярной технологии, использовались, например, в заграждениях Холла (рис. 12), которые были встроены в корпус распределителя зажигания, приводящегося в движение распределительным валом. Это заграждение Холла кроме датчика имеет еще постоянные магниты и магнитомягкие проводники. Магнитный контур имеет U-образную или вилкообразную форму, так что благодаря открытому концу можно использовать замыкатель из мягкомагнитного материала, который попеременно экранирует или разблокирует магниты, благодаря чему датчик Холла выполняет переключения между состояниями operate и release. Следующий способ применения — в цифровом датчике угла поворота рулевого колеса LWS1 (см. «Угловые датчики до 360°»).
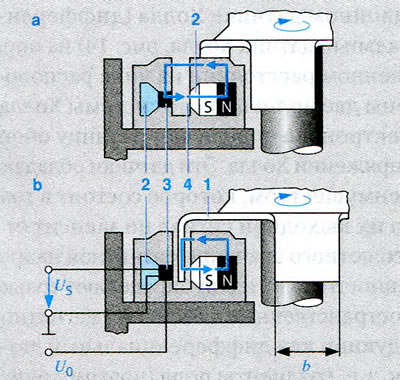
Рисунок 12. Заграждения Холла. а. Беспрепятственный магнитный поток; b. короткозамкнутый магнитный поток; 1. Заглушка шириной b; 2. Магнитомягкие проводники; 3. Холл-IC; 4. Воздушный зазор; UO. Питающее напряжение; US. Напряжение датчика
Датчики Холла такого типа достаточно недорогие, однако хороши только для переключающего режима работы и слишком неточны для анализа аналоговых величин.
Датчики Холла, работающие по принципу «Spinning Current»
Недостатком в простом кремниевом датчике Холла является одновременная чувствительность к механическим напряжениям (пьезоэффект), которые неизбежны при сборке и приводят к нежелательным температурным смещениям характеристик. Используя принцип «Spinning Current» (рис. 13), в сочетании с переходом к технологии CMOS, этот недостаток удалось преодолеть. Хотя пьезоэффект и появляется, он компенсируется временным усреднением сигнала, поскольку появляется при быстрой, регулируемой электронным способом смене электродов (ротации) с различными знаками. Если есть необходимость в экономии трудозатрат на изготовление сложной электроники для переключения электродов, можно интегрировать несколько датчиков Холла (два, четыре или восемь) с соответственно разными направлениями тока, расположив их близко друг к другу, а их сигналы суммировать в контексте сообщения. Принцип Hall-ICs очень хорошо подходит для использования в аналоговых датчиках. Температурные воздействия, оказывающие частично отрицательное влияние на измерительную чувствительность не уменьшаются за счет этого.
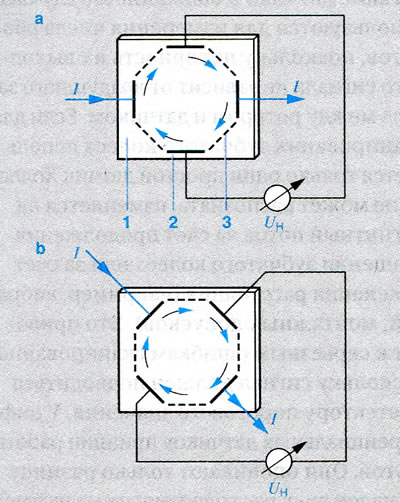
Рисунок 13. Датчик Холла, работающий по принципу «Spinning-Current». а. Фаза поворота φ1; b. Фаза поворота φ2=φ1+45°; 1. Полупроводниковая пластинка; 2. Активный Электрод; 3. Пассивный Электрод; I. Ток питания; UH. Напряжение Холла
Такие интегрированные Hall-ICs подходят преимущественно для измерения малых отрезков, в ходе которого они считывают изменяющиеся показания напряженности поля аппроксимирующего постоянного магнита (например, датчик усилия iBolt, он считывает показания веса пассажира на переднем сидении для оптимального срабатывания подушки безопасности). Подобные хорошие результаты до сих пор были получены только благодаря использованию отдельных элементов Холла, например, сочетания соединений III-V с гибридным последовательно включенным усилителем (например, датчики ускорения Холла).
Дифференциальные датчики Холла
В двойном датчике Холла (дифференциальный датчик Холла, рис. 14) на определенном расстоянии на чипе расположены две полноценные системы Холла. Электроника определяет разницу обоих напряжений Холла. Эти датчики обладают преимуществом, которое состоит в том, что их выходной сигнал не зависит от абсолютного значения магнитной напряженности поля, и они определяют только пространственные изменения магнитной индукции как дифференциальный датчик, т.е. градиенты поля (поэтому они также часто называются градиентными зондами).
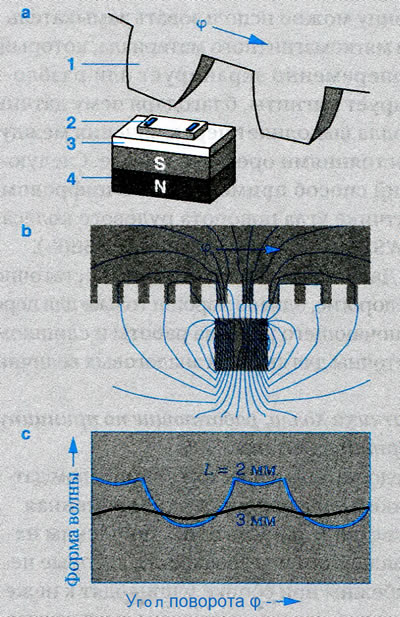
Рисунок 14. Дифференциальный датчик Холла. а. Конструкция; b. Движение поля (1,5-кратное инкрементное расстояние); с. Движение сигнала для ширина воздушного зазора L; 1. Зубчатый венец; 2. Дифференциальный IC Холла; 3. Гомогенизирующая пластина (мягкое железо); 4. Постоянный магнит
Такие датчики в большинстве случаев используются для измерения числа оборотов, поскольку полярность их выходного сигнала не зависит от воздушного зазора между ротором и датчиком. Если для сканирования зубчатого колеса используется только один простой датчик Холла, он не может распознать, изменяется ли магнитный поток за счет продолжения вращения зубчатого колеса или за счет изменения расстояния (например, вибраций, монтажных допусков). Это приводит к серьезным ошибкам сканирования, поскольку сигнал должен подводиться к детектору порогового значения. У дифференциальных датчиков принцип работы другой. Они оценивают только разницу сигналов двух расположенных на нужном расстоянии друг от друга датчиков Холла. Если разница сигналов, например, положительная, расстояние между зубчатым колесом и датчиком можно изменять как угодно; разница будет оставаться положительной, если даже в сумме она станет меньше. Знак может измениться только в случае продолжения вращения ротора. Последовательно подключенный детектор порогового значения также не имеет проблем с определением изменения расстояния и вращением.
Для достижения максимального выходного сигнала выбирают расстояние между двумя—зачастую установленных по краям (продольно) чипа—датчиков Холла, составляющее около половины инкрементного расстояния (расстояние между зубьями). Этот максимум сигнала очень широкий, т.е. он покрывает широкий диапазон вибрации инкрементного расстояния. Большие отклонения от инкрементного расстояния требуют более сложного изменения конструкции датчика.
В качестве градиентного зонда датчик нельзя устанавливать в произвольном положении, он должен максимально точно устанавливаться в направлении вращения инкрементного ротора.
Угловые датчики Холла в диапазоне до 180°
С помощью вращающегося магнитного кольца («Movable Magnet»), а также нескольких стационарных магнитомягких проводников можно получить прямой линейный выходной сигнал для углов большего диапазона (рис. 15). При этом двухфазное поле магнитного кольца проводится через датчик Холла, расположенный между полукруглыми проводниками с прямой проводимостью. Эффективный магнитный поток, проходящий через датчик Холла, зависит от угла поворота φ.
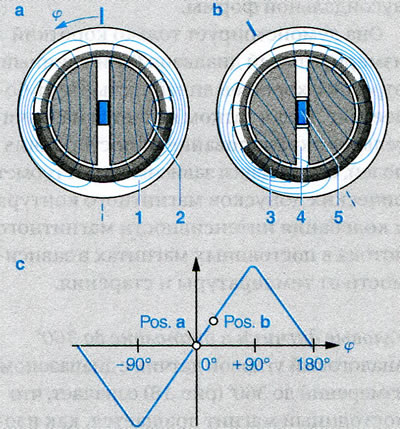
Рисунок 15. Аналоговый угловой датчик Холла (мобильный магнит). Линейная графическая характеристика угла до 180°. а. Положение а; b. Положение b; с. Выходной сигнал; 1. Обратное замыкание железа (мягкая сталь); 2. Статор (мягкая сталь); 3. Ротор (перманентный магнит); 4. Воздушный зазор; 5. Датчик Холла; φ. Угол поворота
Этот принцип применяется в датчиках педали газа.
Производную форму основного принципа «подвижного магнита» представляет собой угловой датчик Холла типа ARS1 с измерительным диапазоном 90° (рис. 16). Магнитный поток постоянно намагниченного диска полукруглой формы отводится к магниту через полюсный башмак, два проводника с прямой проводимостью и ферромагнитную ось. При этом в зависимости от положения угла поток проводится в большей или меньшей степени через оба проводника с прямой проводимостью, в магнитном пути которых также находится датчик Холла.
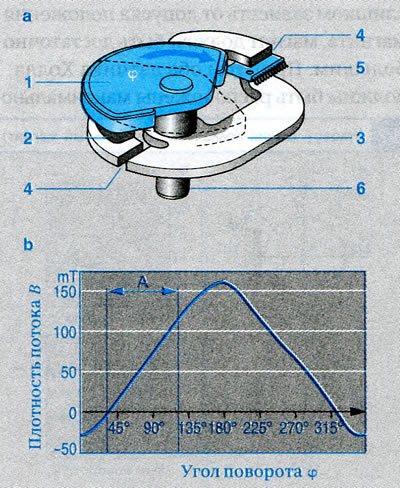
Рисунок 16. Угловой датчик Холла ASR1 (мобильный магнит). Линейная графическая характеристика для угла до 90°. а. Конструкция; b. Графическая характеристика в рабочем диапазоне А; 1. Роторный диск (постоянно магнитный); 2. полюсный башмак; 3. Проводник с прямой проводимостью; 4. Воздушный зазор; 5. Датчик Холла; 6. Ось (магнитомягкий)
Таким образом магнитный диапазон позволяет достичь линейной характеристики. При упрощенном расположении в модели типа ARS2 отсутствуют магнитомягкие проводники (рис. 17). Здесь магнит движется по дуге окружности вокруг датчика Холла. Образующийся при этом синусоидальный ход графической характеристики только на относительно коротком отрезке имеет хорошую линейность. Если датчик Холла расположен немного за пределами середины круга, характеристика значительно отклоняется от синусоидальной формы.
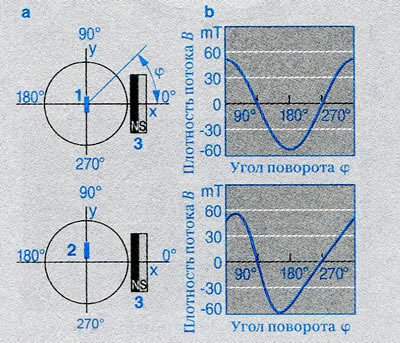
Рисунок 17. Угловой датчик Холла ASR2 (мобильный магнит). Линейный график для угла более 180°. а. Принцип; b. Графическая характеристика; 1. IC Холла, расположен в центре круговой направляющей; 2. IC Холла, смещен от центра (линеаризация); 3. Магнит
Она демонстрирует только короткий измерительный диапазон 90° и длинный отрезок с хорошей линейностью чуть более 180°. Недостатком является незначительное экранирование от посторонних полей, остающаяся зависимость от геометрических допусков магнитного контура и колебания интенсивности магнитного потока в постоянных магнитах в зависимости от температуры и старения.
Угловые датчики в диапазоне до 360°
Аналоговый угловой датчик с диапазоном измерений до 360° (рис. 18) означает, что постоянный магнит вращается, как изображено, над ортогональным расположением двух датчиков Холла. Чтобы не слишком зависеть от допуска положения магнита, магнит должен быть достаточно большим. При этом оба датчика Холла должны быть расположены максимально близко друг к другу в части того же направления постоянного магнитного поля рассеяния, которое отображает положение угла ф постоянного магнита. Они направлены под прямым углом относительно друг друга и параллельно оси вращения постоянного магнита, таким образом считывают показания компонентов х- и у- вектора напряженности поля В, вращающегося над ними:
(3) UH1 = Ux = B·sinφ
(4) UH2 = Uy = B·cosφ
На основании этих двух сигналов можно рассчитать угол φ по тригонометрическому соотношению φ=arctg(UH1/UH2) в чипе для обработки данных, который можно приобрести в продаже и с помощью которого оцифровывается сигнал.
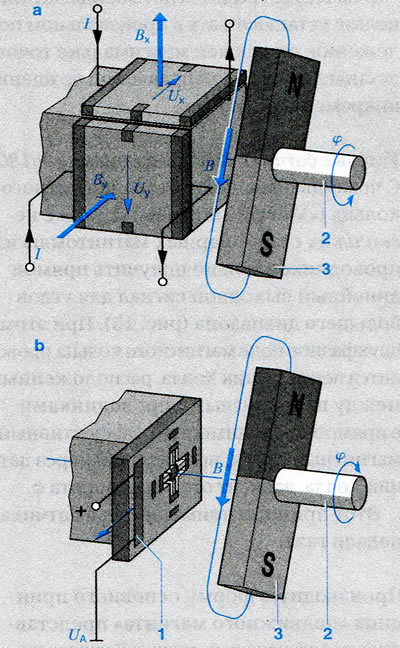
Рисунок 18. Аналоговый датчик Холла для угла 360°. а. Конструкция дискретного IC Холла; b. Конструкция из планарного интегрированного 1C Холла; 1. Сигнальная электроника; 2. Распределительный вал; 3. Управляющий магнит; В. Индукция; I. Ток; U. Spannung; UA. Напряжение; φ. Выходное напряжение
Такое расположение датчика Холла позволяет осуществлять интеграцию с вертикальными устройствами Холла (Vertical Hall Devices) в таком виде, как изображено на рисунке, так, чтобы площадь сенсорного чипа располагалась вертикально по отношению к оси вращения, а датчик, в отличие от обычного, планарного датчика Холла, обладал чувствительностью в плоскости вращения (рис. 19). Монолитная интеграция гарантирует высокую точность необходимого расположения под прямым углом, а также желаемую компактную конструкцию обеих систем Холла. Компания «Sentron» («Melexis»), Швейцария работает над созданием таких датчиков и в будущем представит их на рынке.
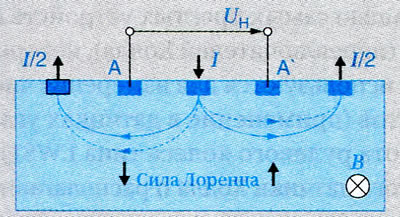
Рисунок 19. Вертикальное устройство Холла в поперечном разрезе. Потоки I, направленные внутрь чипа, отклоняются за счет сил Лоренца по причине магнитной индукции В, направленной параллельно поверхности чипа,таким образом, что между поверхностными электродами А и А' снимается напряжение Холла UH
Угловые датчики такого типа рассматривались, например, для реализации пусковых систем мгновенного старта, в которых абсолютного положение вращения распределительного вала должно измеряться в диапазоне 360°.
В принципе, существует еще один способ, с помощью которого обычному планарному датчику Холла (дополнительно) можно придать чувствительность в плоскости вращения. При методе, используемом компанией Melexis-Sentron (например, тип 2SA-10) для измерения компонентов поля, появляющиеся в плоскости вращения Вх и Ву на одинаковом чипе вместе с четырьмя датчиками Холла, смещенными по отношению друг к другу на 90°, располагаются на узкой окружности. При этом каждый датчик состоит по указанным выше причинам из пары элементов Холла, повернутых на 90°. После завершения изготовления чипа на его поверхность устанавливается круглый диск из магнитомягкого материала с диаметром ок. 200 мкм, как показано на рисунке 20 таким образом, чтобы датчики Холла четко попали под край диска.
На основании их высокой относительной магнитной проницательности этот диск действует как концентратор потока (IMC, встроенный магнитный концентратор) и вынуждает все линии поля вертикально входить в его поверхность. За счет этого линии поля, проходящие горизонтально без концентратора потока (в плоскости вращения) в месте расположения датчиков Холла, вынужденно направляются в вертикальном направлении (вне плоскости вращения) и поэтому могут модулировать элементы Холла. Поскольку элементы, расположенные диагонально друг к другу, «видят» противоположные направления поля, то для считывания одного компонента поля будет определяться разница обеих противоположных одинаковых напряжений Холла. Одновременно за счет этого существующие вертикальные компоненты Bz взаимно устраняют свой эффект.
За счет дополнительного анализа суммарных сигналов элементов, расположенных по диагонали друг к другу, можно определить также параметры вертикальных компонентов поля Bz; поскольку на них ферромагнитный диск не оказывает воздействия, и элементы из-за их расположения не утрачивают свою обычную чувствительность вне плоскости вращения. Таким образом, благодаря такому расположению индукционный вектор В, действующий в месте расположения датчика, считывается во всех трех компонентах. Электронные переключающие средства, необходимые для анализа сигнала, включая цифровой сигнальный процессор, который используется для расчета функции арктангенса, базирующийся на базе микроконтроллера (DSP), и средства, необходимые для конечной корректировки датчика (EEPROM), могут быть интегрированы вместе с датчиком на тот же чип без особых затрат.
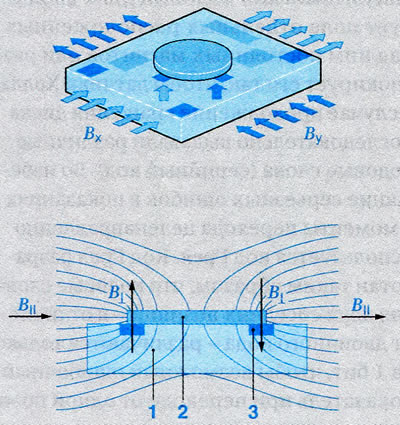
Рисунок 20. Комплект 4x2 планарных датчиков Холла с IMC. IMC - интегрированный магнитный концентратор. Элементы Холла расположены на чипе попарно под углом 90° друг к другу прямо под краем маленькой ферромагнитной шайбы. Благодаря их присутствию магнитная индукция В|| у параллельная поверхности чипа преобразуется в магнитную индукцию В⊥, перпендикулярную его поверхности, для того, чтобы быть распознанной датчиками Холла
Для измерения углов до 360° достаточно, чтобы над чипом датчика с интегрированным анализатором сигнала вращался постоянный магнит, преимущественно круглой формы (рис. 21), намагниченный параллельно чипу. Поскольку угол поворота образуется с помощью функции арктангенса из соотношения обоих возникающих синусоидальных и косинусоидальных сигналов датчика, интенсивность магнитного поля, а стало быть, и старение магнита, его температурная зависимость и расстояние до поверхности датчика не играют никакой роли. Датчик определяет только положение вращения своего возбуждения.
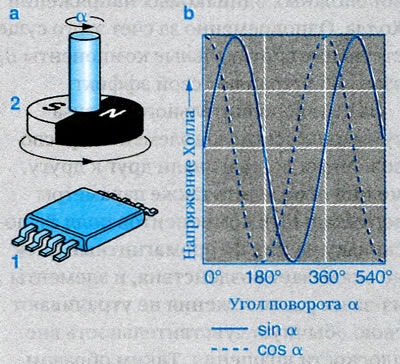
Рисунок 21. Измерение угла больше 360° с помощью четверного датчика Холла. Измерение угла в конце вала вращения с помощью четверного датчика Холла фирмы Melexis, в состав которого входит интегрированный концентратор потока (IMC) для переключения поля. а. Измерительное устройство; b. Первичные выходные сигналы
Максимальная собственная погрешность датчика указана производителем в диапазоне 360° в размере + 2°. Ее можно уменьшить при калибровке датчика пользователем. В этом случае точность цифрового выхода составит 10 бит при разрешающей способности 12 бит. На основании времени обработки сигнала процессором кратчайшая частота дискретизации для частоты такта 20 МГц составляет 200 мкс. Выход сигнала, модулированный частотой пульсации, можно использовать при максимум 1 кГц. Для инициализации датчику требуется 15 мс. Стандартный параметр силы электромагнитного поля составляет ок. 40 mT. При плотности потока выше 0,7 Т пластинка концентратора переходит в состояние насыщения.
Датчик преимущественно можно программировать также для любого диапазона измерений ≤360°, при этом создается дополнительная эксплуатационная надежность за счет контроля выхода за пределы диапазона (использование, например, в качестве углового датчика в режиме работы педали газа FPM2.3).
Углы до 360° можно определять также с помощью самых простых устройств 1C Холла (переключателей Холла), которые также используются для измерения числа оборотов (применение в датчиках угла поворота рулевого колеса типа LWS1). Для этого датчики Холла n располагаются однолинейно и равномерно на окружности для считывания n бит (рис. 22). Магнитомягкий кодовый диск блокирует поле отдельных расположенных над ним постоянных магнитов или разблокирует его так, чтобы датчики Холла в случае продолжение вращения диска последовательно выдавали различные кодовые слова (серийный код). Во избежание серьезных ошибок в показаниях в моменты перехода целенаправленно используется код Грея. Код Грея разработан таким образом, что кодовые слова для двух соседних позиций — в отличие от двоичного кода — различаются только на 1 бит, чтобы возможный ошибочный показатель при переходе от одной позиции к следующей не превышал шаг угла.
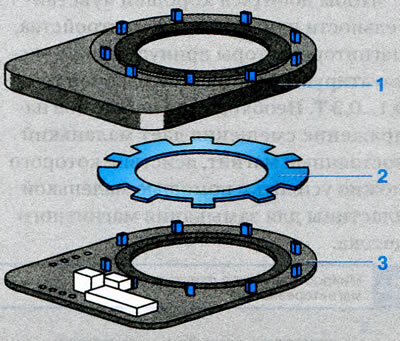
Рисунок 22. Цифровой угловой датчик Холла с n переключателями Холла. Измерение угла до 360° при равноудаленном расположении простых переключателей Холла по окружности. 1. Корпус с постоянными магнитами; 2. Кодовый диск; 3. Проводниковая пластина с переключателями Холла
Для создания датчика угла поворота рулевого колеса кодовый диск, например, соединяется с валом рулевого управления, а оставшаяся часть датчика с шасси Сложность этого датчика состоит в том, что магнитомягкий кодовый диск должен монтироваться на подшипниках в плавающем состоянии, что приводит к выполнению сложного и объемного крепления с помощью гибких пластиковых манжет. Кодовый диск из соображений допусков по воздушному зазору между верхним и нижним дисками должен проходить впритирку. Соответствующее оптоэлектронное решение с использованием фотоячеек не является полностью удовлетворительным, поскольку в связи с чувствительностью элементов датчика к загрязнению нет возможности обеспечить их качественную защиту.
Многократное число оборотов можно считывать с помощью дополнительного простого 3-битного устройства, кодовый диск которого движется над понижающим редуктором. Разрешающая способность таких устройств зачастую не выше 2,5°.
Магниторезисторные датчики
Наряду с поперечно направленным эффектом Холла на полупроводниковых пластинках наблюдается и продольный эффект сопротивления, который также называют эффектом Гаусса. Элементы, которые используют этот эффект, известны как «магниторезисторы» (торговое название фирмы «Siemens») и изготавливаются из IH-V-полупроводника, кристаллического антимонида индия (InSb). В отличие от датчиков Холла оптимальная пластинка для магниторезисторов должна быть скорее короткой и негибкой, т.е. сначала создавать очень низкое электрическое сопротивление. Чтобы добиться технически полезных показателей в зоне кОм, большое число таких пластинок должны последовательно подключаться друг за другом. Элегантность конструкции можно обеспечить путем установки микроскопических игл из никель-антимония с высокой проводимостью в полупроводниковый кристалл, располагая их поперечно к направлению движения тока, и за счет дополнительного изгиба полупроводникового сопротивления (рисунки 23 и 24).
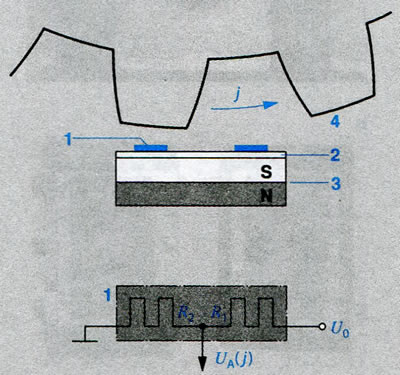
Рисунок 23. Магниторезисторный дифференциальный датчик. Магнитное управление магниторезисторного дифференциального датчика для сканирования зубчатого колеса (инкрементальное измерение угла, определение числа оборотов). 1. Магниторезисторное сопротивление R1 R2; 2. Магнитомягкий субстрат; 3. Постоянный магнит; 4. Зубчатое колесо; UO. Напряжение питания; UA. Выходное напряжение при угле поворота φ
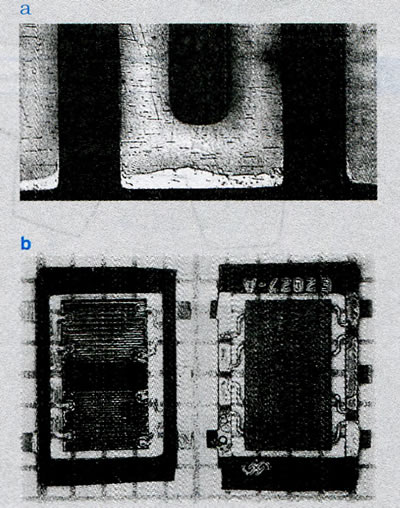
Рисунок 24. Микроскопическая фотосъемка магниторезистора. а. Микроскопическая фотосъемка (фрагмент); b. На ферритном субстрате на 8-мм суперпленке
Зависимость сопротивления от магнитной индукции В до индукционных показателей в размере 0,3 Т квадратичная, а при превышении этих показателей — возрастающая линейная. Диапазон регулирования по направлению вверх неограничен, временное поведение в технических условиях применения—также как и в датчиках Холла — следует рассматривать как практически безынерционное.
Поскольку параметр сопротивления магниторезисторов отображает сильные температурные изменения (ок. 50% уменьшения через 100 К), большей частью они поставляются лишь как двойная компоновка в схеме делителя напряжения (дифференциальные магниторезисторы). В этом случае оба сопротивления делителя должны модулироваться магнитным способом встречно (с обратной последовательностью). Переключение сопротивления делителя гарантирует, несмотря на слишком высокий температурный коэффициент отдельных сопротивлений, действительно хорошую стабильность точки симметрии (рабочая точка), в которой оба сопротивления делителя имеют одинаковое значение.
Чтобы добиться хорошей чувствительности измерительного устройства, магниторезисторы принудительно эксплуатируют в магнитной рабочей точке 0,1...0,3 Т. Необходимое магнитное напряжение смещения дает маленький постоянный магнит, действие которого можно усилить с помощью маленькой пластины для замыкания магнитного потока.
Преимуществом магниторезисторов является их высокий уровень сигнала, который даже без усиления находится в зоне вольт и, таким образом, бережет электронику и уменьшает количество мер защиты. Кроме того, как пассивные, резистивные компоненты они очень нечувствительны к электромагнитным помехам, а из-за высокого поля предварительного напряжения — почти устойчивы к посторонним магнитным полям. Из-за сильных температурных изменений магниторезистор почти всегда применяется в инкрементных угломерах и датчиках числа оборотов или двойных датчиках предельного значения (с характеристикой переключения).
Анизотропные магниторезистивные датчики (АМР)
Тонкие, толщиной всего 30...50 нм NiFe-покрытия отображают электромагнитный анизотропный процесс. Это означает, их электрическое сопротивление изменяется под воздействием магнитного поля. Поэтому структуры сопротивлений такого типа называют анизотропными магниторезистивными элементами или датчиками (сокращенно АМР). Используемый металлический сплав известен также под названием Permalloy.
Технология и модели
На удлиненной резистивной полоске, показанной на рис. 25а, создается небольшое спонтанное намагничивание (возбуждение) MS в продольном направлении токопроводящей дорожки без внешнего управляющего поля (анизотропия формы). Для того чтобы задавать ему однозначное единое направление — оно может быть теоретически и противоположным — датчики АМР, как отображено, часто снабжают слабым магнитом входного тока. В таком состоянии продольное сопротивление имеет свой максимальный показатель R||. Если вектор намагничивания под воздействием дополнительного внешнего поля Ну поворачивается на угол и, продольное сопротивление постепенно снижается до достижения своего минимального значения R⊥, при v=0. При этом сопротивление зависит только от угла v, который создается намагничиванием MS и током I, в зависимости от и его динамику отражает косинусоида:
(5) R = R0 · (1 + βcos²v)
mit R|| = R0 · (1 + β); R⊥ = R0
При этом коэффициент β характеризует максимальное возможное колебание сопротивления. Он составляет ок. 3% Если внешнее поле гораздо больше, чем спонтанное намагничивание (что всегда наблюдается в случае с управляющими постоянными магнитами), направление внешнего поля также практически всегда определяет действующий угол v. Сумма напряженностей поля не имеет значения, т.е. датчик работает, так сказать, в «в насыщении».
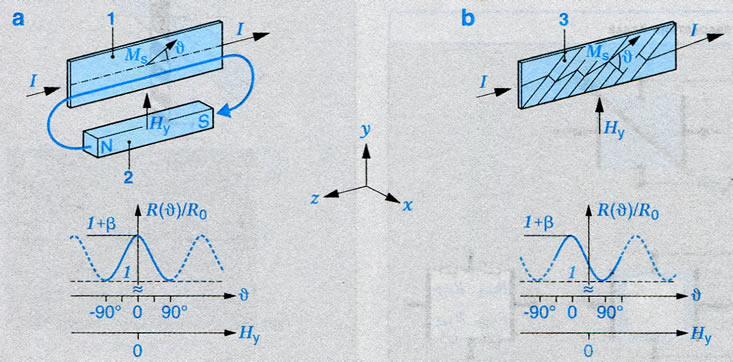
Рисунок 25. Основной принцип работы АМР (анизотропных магниторезистивных датчиков), структура «косых полос на индикаторе состояния»
Короткозамкнутые полоски, обладающие высокой проводимостью, (например, из золота) над слоем АМР вынуждают ток без внешнего поля течь под углом 45° по отношению к спонтанному намагничиванию (продольное направление). Благодаря этой «фишке» — именуемой «датчик с косыми полосами на индикаторе состояния» — графическая характеристика датчика смещается относительно графической характеристики простого сопротивления на 45°. При наружной напряженности поля Ну=0 она находится в точке максимальной измерительной чувствительности (точка поворота).
Прокладывание противоположных полос двух сопротивлений обеспечивает изменение ими своего сопротивления на противоположное под воздействием этого же поля. Это означает, что если одно увеличивается, то другое одновременно уменьшается.
В качестве тонкослойных датчиков, они имеют еще одно преимущество, состоящее в том, что, например, их можно корректировать до заданного параметра с помощью лазерной балансировки (например, обнулять). В качестве материала носителя используются окисленные кремниевые диски, в которые принципиально может интегрироваться электроника для подготовки сигнала. В настоящее время в целях экономии все еще предпочитают отдельно производить чип электроники и датчика и устанавливать их, например, на общей рамке. Управляющее магнитное поле В создается чаще всего благодаря магниту, который движется над датчиком поступательно или вращательно.
Наряду с простыми двухполюсными элементами АМР существуют также псевдодатчики Холла в почти квадратных тонкослойных структурах NiFe, которые, как и обычные датчики Холла, имеют четыре подключения. Два для токопроводящей дорожки и два поперечных для съема (псевдо-) напряжения Холла (рис. 26). В отличие от обычных датчиков Холла псевдодатчик Холла обладает чувствительностью к магнитным полям в плоскости слоя, а не вертикально к ней. Он отображает не пропорциональную графическую характеристику, а очень точную синусоиду, которая ни в коем случае не зависит от силы управляющего поля и температуры. Для поля, параллельного токопроводящей дорожке, выходное напряжение исчезает, чтобы затем при повороте до угла φ=90° описать полупериод синуса. Полученное таким образом синусоидальное напряжение получается с амплитудой:
(6) UH = uH · sin2φ
Если внешнее управляющее поле однократно поворачивается на φ=360°, то выходное напряжение также повторяет два полных синусоидальных периода. Амплитуда uH сильно зависит от температуры и размера воздушного зазора между датчиком и управляющим магнитом; она уменьшается при росте температуры и увеличении воздушного зазора.
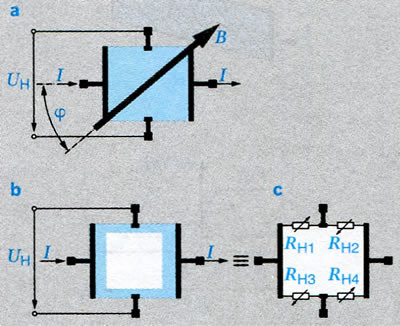
Рисунок 26. Псевдодатчик Холла. а. Полногранная основная форма; b. Измененная форма с полой поверхностью; с. Электрическая эквивалентная схема для формы b
Измерительную чувствительность псевдоэлементов Холла можно значительно увеличить (не слишком искажая синусоидальную форму), если изначально полногранные элементы сделать полыми, чтобы от них осталась только рамка (рис. 26b). За счет этой модификации датчик псевдо-Холла в том числе и по своей геометрической форме трансформируется в полный мост из четырех AMP-сопротивлений (рис. 26с). Даже дополнительное изгибание сопротивлений моста не слишком искажает синусоидальную форму сигнала, если только определенная ширина дорожки меандра не будет меньше заданной.
Простой угломер АМР для диапазона менее 30°
Магниторезистивные угломеры в версии с ограниченной точностью и диапазоном измерений (макс.±15°) используют рассогласование магниторезистивного делителя напряжения (дифференциальный датчик), состоящего из продольных (теоретически даже меандровых) сопротивлений из пермаллоя с высококачественными поперечными золотыми полосами (рис. 27). В таких датчиках нулевая точка не зависит от расстояния от магнита до датчика и не влияет на рост графической характеристики, которая все еще зависит от температуры (ТК почти -3·10-3/К).
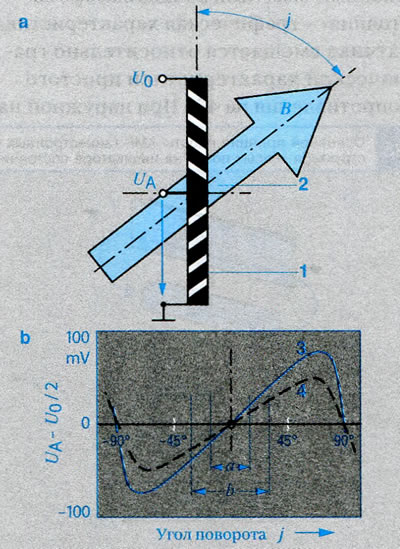
Рисунок 27. Магниторезистивный угломер (косые полосы на индикаторе состояния). Диапазон измерений до±15°. а. Измерительный принцип; b. Графическая характеристика; 1. Сопротивления пермаллоя; 2. Поворотный постоянный магнит с управляющей индукцией В; 3. Низкая рабочая температура; 4. Более высокая рабочая температура; а. Линейный диапазон измерений; b. Используемый диапазон измерений; UA. Выходное напряжение; UO. Напряжение питания(5В); φ. Угол поворота
Такой датчик рассматривался как экономичная альтернатива для измерения положения педали.
Простой датчик скорости АМР для миллиметрового диапазона
Точно также с помощью отдельных дифференциальных косых полос на индикаторе состояния можно создать простейшие датчики скорости с диапазоном измерений, равным обычно нескольким миллиметрам (рис. 28). Для достижения хорошей точности требуются только постоянное расстояние (воздушный зазор) между датчиком и движущимся магнитом, который воплощает измеряемое положение s. Изменение температуры, отображаемое ростом графической характеристики, очень просто и хорошо компенсируется с помощью дополнительного металлического тонкослойного датчика на одинаковой подложке, который имеет почти такой же ТК, но обратным знаком (например, Pt, Ti, Ni).
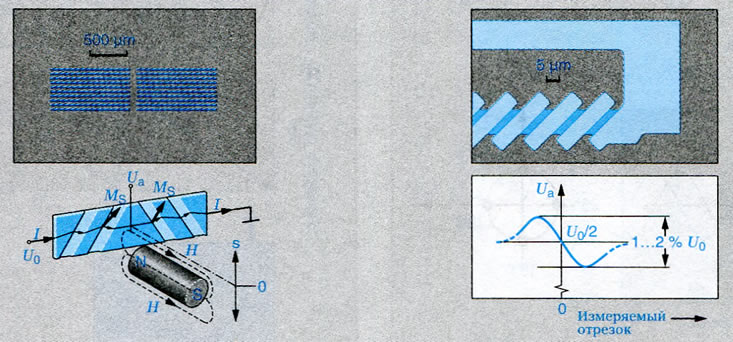
Рисунок 28. Измерение отрезка с помощью одной дифференциальной косой полосы на индикаторе состояния
Высокоточный мультидатчик (POMUX) для отрезков более 10 мм
Существует «умный» мультидатчик с косыми полосами на индикаторе состояния для измерения отрезка пути, известный под торговой маркой POMUX (позиционный мультиплекс). Он использует тот факт, что точка симметрии и нулевая точка графической характеристики абсолютно не зависит от воздушного зазора и температуры. Его использование в автомобиле часто рассматривалось (например, измерение хода амортизатора), поскольку он обладает прекрасными характеристиками, а именно, исключительной точностью. Он уже изображался в форме окружности как угломер для определения низкочастотно настроенного гравитационного колебания, с помощью которого можно определить положение автомобиля (датчик наклона).
Угломер для 180°
Магниторезистивные угломеры в версии псевдодатчиков Холла используют высокоточную синусоидальную форму сигнала, который считывается на выходных клеммах четырехфазной, полногранной структуре датчика. При этом два полных периода электрического выходного сигнала соответствуют механическому повороту магнита на 360°. С помощью второго элемента, повернутого на 45°, дополнительно вырабатывается косинусоидальный сигнал (рис. 30). По соотношению обеих напряжений сигнала можно определить угол измерений (например, при использовании функции арктангенса) с высокой точностью в диапазоне 180°, независимо от изменений температуры и колебаний интенсивности магнитного поля (расстояние, старение) (например, с помощью микроконтроллера или ASIC).
Следующим условием для получения высокой точности этого датчика является то, что на обоих мостах поле должно иметь как минимум одинаковое направление (начиная от определенного значения силы (мощности), сумма не имеет значения), что может гарантироваться только в том случае, если оба моста расположены друг над другом. Удалось найти решение, при котором оба моста, смещенные на 45°, так переплетены друг с другом, что они могут рассматриваться как одна точка и, в принципе, располагаются друг над другом (рис. 29).
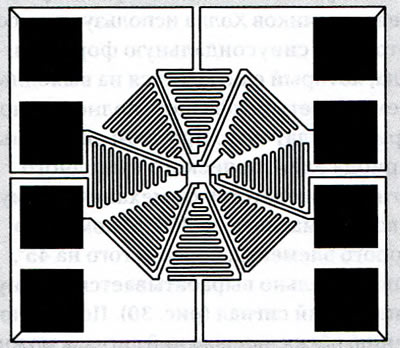
Рисунок 29. Мосты АМР, уложенные друг в друга. Уложенные друг в друга мосты АМР, повернутые на 45°
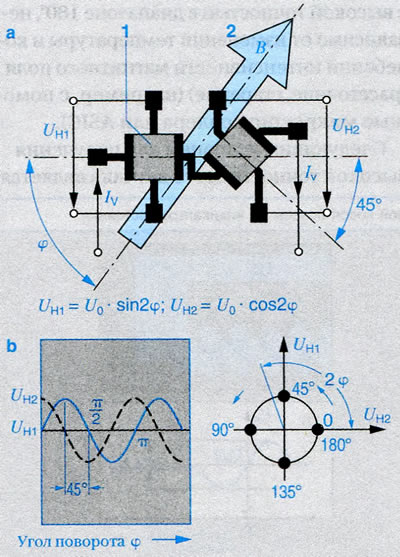
Рисунок 30. Магниторезистивный угломер (псевдодатчик Холла). Диапазон измерений до 180°. а. Измерительный принцип; b. Выходные сигналы; 1. Тонкий слой NiFe (датчик АМР); 2. Вращающийся постоянный магнит с управляющей индукцией В; Iv Ток питания; UH1, UH2. Измеряемое напряжение; φ. Угол поворота
Угломер для 360°
Огромным недостатком угломеров АМР является их естественное ограничение по однозначно определяемому диапазону измерений угла 0°...180°. Это ограничение можно преодолеть посредством модуляции направления магнитного поля с помощью переменного магнитного вспомогательного поля (рис. 31). Тогда, в отличие от сигналов датчика с периодичностью 180°COS и SIN, эти угломеры имеют модуляционные сигналы с периодичностью 360°.
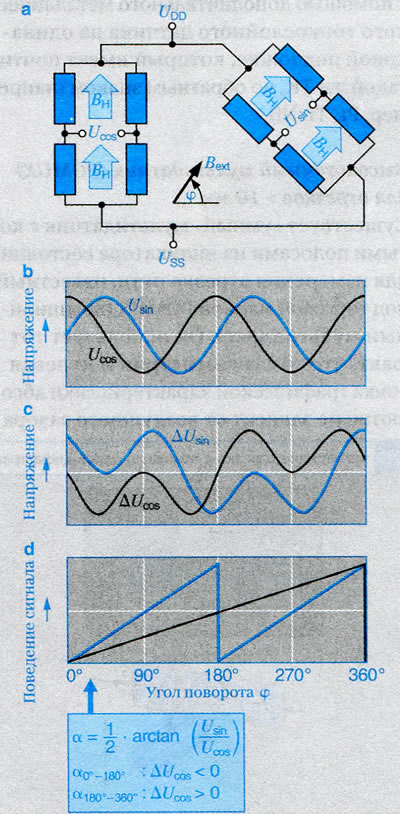
Рисунок 31. Угломер АМР 360° с модуляцией направления движения поля. а. Переключение моста; b. Выходные сигналы мостиков Уитстона; с. Влияние на сигналы вспомогательного поля; d. Выходной сигнал переключателя обработки данных; ВH. Управляющая индукция; UDD, USS. Питающее напряжение; Usin, Ucos. Измеряемые напряжения; φ. Угол поворота
Таким образом удается добиться распознавания диапазонов только за счет определения знака модуляционных сигналов, и, вместе с тем, удвоения диапазона однозначности на 0°...360°. Благодаря тому, что вспомогательное поле на обоих мостах датчика направлено в разные стороны, оба модуляционных сигнала смещаются по фазе. Для распознавания диапазона достаточно лишь определить знак более сильного по сумме модуляционного сигнала. Благодаря этому распознавание диапазона станет некритичным и возможным даже при сильных модуляционных сигналах.
Магнитное вспомогательное поле вырабатывается благодаря планарной катушке, интегрированной в чип АМР датчика (рис. 32). В соответствии с проводкой вспомогательное поле при полном мостике COS и SIN показывает направления, отличающееся на 45°.
Рисунок 32. Схема угломера АМР 360°
Датчик можно устанавливать только в конце вращающегося вала, т.е., например, на конце вала рулевого управления для измерения угла поворота рулевого колеса в системах, которые обходятся без определения многократных оборотов вала рулевого колеса (например, датчик угла поворота рулевого колеса LWS4).
Угломер в диапазоне выше 360° (многократные обороты)
Многократные повороты вращающейся детали, например, вала рулевого управления, можно измерить с помощью двойного расположения «псевдоугломера Холла» (по 180°). Оба соответствующих постоянных магнита вращают с помощью мультиплицируемой коробки передач (рис. 33). Поскольку два малых отрабатывающих зубчатых колеса, на которых расположены постоянные магниты, отличаются по количеству зубцов на один (количество зубцов m и m+1), их противоположное расположение фаз (разница угла поворота: Ф - 0) является однозначной величиной для абсолютного положения угла ф вала рулевого управления. Система рассчитана так, что подобная разница фаз при общем числе оборотов вала рулевого управления, равном четырем, не превышает 360°, и таким образом гарантируется однозначность измерений. Каждый отдельный датчик, кроме того, выдает неоднозначное точное разрешение угла поворота. Благодаря такому расположению можно получить разрешение, например, для всего диапазона угла поворота рулевого колеса, точнее 1° (использование этого принципа в датчике угла поворота рулевого колеса LWS3).
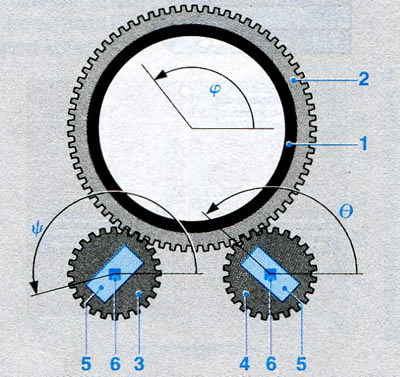
Рисунок 33. Расположение для измерения угла больше 360°. 1. Управляемый мост; 2. Зубчатый венец; 3. Зубчатое колесо с m зубцами; 4. Зубчатое колесо с m+1 зубцами; 5. Магнит; 6. АМР-измерительные ячейки; φ. Угол поворота вала рулевого управления; ψ, θ. Угол поворота маленьких зубчатых колес
Сверхточные магниторезистивные датчики (датчики сверхбольшого магнитного сопротивления) (СМР)
Технология измерений СМР была разработана несколько лет назад и теперь начинает применяться при определении углов и числа оборотов в автомобильной промышленности. Существенные преимущества технологии СМР по сравнению с технологией датчиков АМР (анизотропных магниторезистивных) состоят в естественном однозначном диапазоне 360° при определении угла и высокой чувствительности магнита при определении числа оборотов.
В отличие от анизотропных магниторезистивных датчиков, датчики СМР состоят не только из магнитного функционального слоя, а, большей частью, из сложной системы слоев. В основном различают две системы: первая — мультислои СМР обычно с 20 последовательностями из чередующихся магнитомягких и немагнитных отдельных слоев (Рис. 34а). Вторая — спиновые вентили СМР, состоящие из антиферромагнитных, ферромагнитных и немагнитных функциональных слоев. Толщина отдельных слоев в обеих системах составляет 1...5 нм, т.е. охватывает только несколько атомных слоев.
Электрическое сопротивление набора слоев СМР зависит от угла между намагниченностями соседних ферромагнитных отдельных слоев. Оно является максимальным при их антипаралелльном расположении и минимальным — при параллельном (рис. 34b).
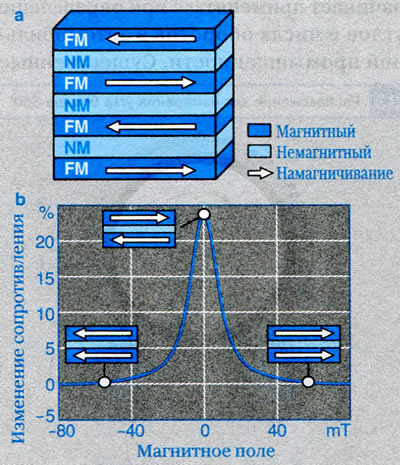
Рисунок 34. Многослойный пакет СМР с графической характеристикой. а. Модель; b. Изменение сопротивления в зависимости от магнитного поля; FM. Магнитомягкий отдельный слой; NM. Немагнитный отдельный слой
Мультислои СМР
Относительное изменение сопротивления (эффект СМР) составляет в мультислоях СМР 20...30% и, соответственно, на коэффициент 10 превышает эффект АМР (анизотропный магниторезистивный датчик). Чтобы расположить рабочую точку в чувствительном диапазоне графической характеристики, к многослойному пакету СМР добавляют один твердомагнитный слой, который дает подходящее подмагничивающее поле. Чувствительность такой сенсорной структуры составляет примерно 0,8 %/мТ, что выше, чем у анизотропных магниторезистивных структур с косыми полосами на индикаторе состояния.
CMP-спиновые вентили
Спиновые вентили СМР (рис. 35) также подходят для определения угла. Эталонное намагничивание, необходимое для определения угла, вырабатывается в них таким образом, что направление намагничивания одного из ферромагнитных слоев (FM1) фиксируется за счет взаимодействия с соседним антиферромагнитным слоем (АФМ). Поэтому их называют «соединенными слоями». Напротив, намагничивание второго ферромагнитного слоя (FM2), магнитно расцепленного через немагнитный промежуточный слой, может свободно вращаться с помощью внешнего магнитного поля. Поэтому такие слои называют «свободными слоями».
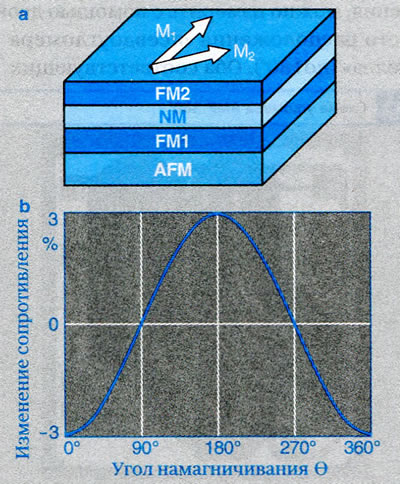
Рисунок 35. Пакет слоев спинового вентиля СМР с графической характеристикой. а. Конструкция; b. Изменение сопротивления в зависимости от угла намагничивания; FM1. Антиферромагнитный отдельный слой; FM2. ферромагнитный отдельный слой; NM. немагнитный отдельный слой
Сопротивление изменяется в косинусообразной зависимости от угла φ между внешним направлением поля и эталонным направлением. Решающим фактором для точности измерения угла является стабильность эталонной магнетизации в сравнении с воздействием внешнего поля. Эта стабильность значительно повышается за счет использования дополнительного искусственного антиферромагнита (SAF) (рис. 36). В данном случае речь идет о двух ферромагнитных слоях, которые соединены через очень тонкий немагнитный промежуточный слой антиферромагнитным способом и за счет своего суммарно исчезающего магнитного нетто-момента не предоставляют внешнему полю контактной поверхности. Намагничивание одного из этих обоих слоев фиксируется соседними естественными антиферромагнитами (АФМ). Определяющим для магнитного процесса в многослойной системе является как взаимодействие соединенных слоев с естественными антиферромагнитами (АФМ), так и взаимодействие ферромагнитных слоев друг с другом (PL, RL, FL).
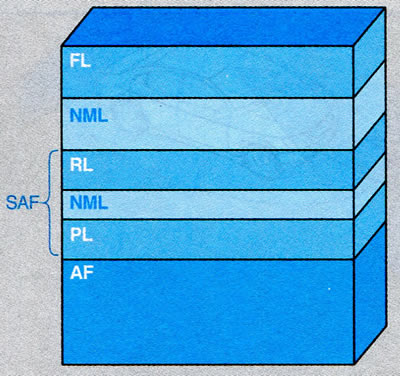
Рисунок 36. Спиновые вентили СМР с искусственным антиферромагнитом. FL. Свободный слой; NML. Промежуточный слой; RL. Эталонный слой; PL. Соединенный слой; AF. Антиферромагнит
Кроме того, процесс отражается также как и в сенсорных структурах АМР за счет анизотропии формы и кристаллов отдельных магнитных слоев.
Угломер СМР, как и угломер АМР, состоит из двух мостиков (целых перемычек), из которых одна производит косинус-сигнал, а другая синус-сигнал в зависимости от направления внешнего поля (рис. 37). Необходимые для этого различные магнитные эталонные направления МР вырабатываются за счет локального нагревания отдельных сопротивлений измерительных мостов и охлаждения на прилегающем магнитном поле соответствующего ориентирования. За счет арктангенциального соединения обоих сигналов мостов направление поля можно однозначно определить во всем угловом диапазоне 0°...360°.
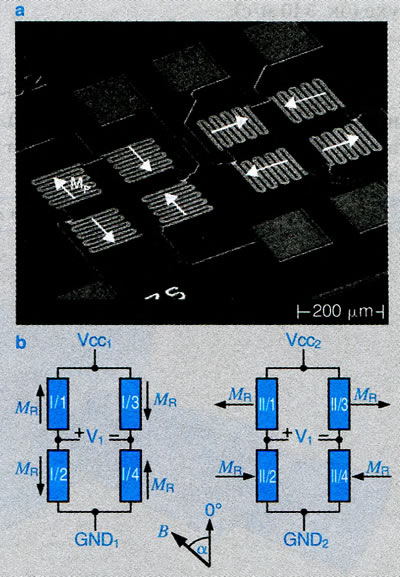
Рисунок 37. Угломер СМР с двумя мостиками (целыми перемычками). а. Схема; b. Подключение; Mr. Магнитное эталонное намагничивание
Датчики распространения волн
В течение последних лет разработки сосредоточены большей частью на датчиках, которые определяют ближнее и дальнее окружение, т. е расстояние до других автомобилей или участников движения и препятствий. Круговой обзор автомобиля (рис. 38) позволяет использовать системы, повышающие безопасность и помогающие вести автомобиль (системы сопровождения водителя).
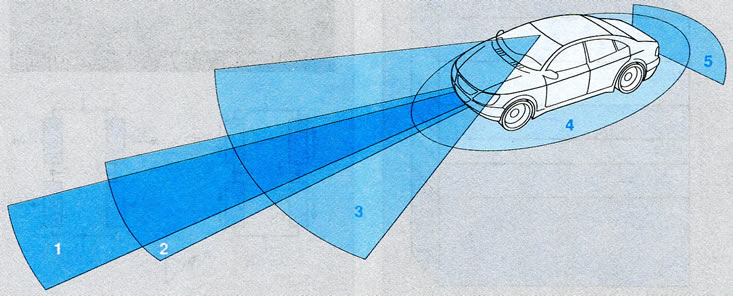
Рисунок 38. Круговой обзор автомобиля: зоны определения датчиков. 1. 77 ГГц дальняя зона ≤200 м — горизонтальный угол раскрытия±8°; 2. Инфракрасная зона ночного видения ≤150 м - горизонтальный угол раскрытия±10°; 3. Видео - средняя зона ≤80 м - горизонтальный угол раскрытия±22°; 4. Ультразвук - ультраблизкая зона ≤3 м - горизонтальный угол раскрытия±60°; 5. Видео - задняя зона - горизонтальный угол раскрытия±60°
Ультразвуковая технология
Для измерения расстояния между автомобилем и препятствием в зоне распознавания до 2,5 м используются ультразвуковые датчики. С их помощью можно осуществлять контроль за окружением автомобиля во время парковки и маневрирования (парктроник).
По аналогии с принципом эхолота ультразвуковые датчики посылают ультразвуковые импульсы с частотой ок. 43,5 кГц и определяют временной интервал между отправкой импульса и возвращением эхоимпульса, отраженного от препятствия (рис. 39). Расстояние l между датчиком и ближайшим препятствием рассчитывается по времени распространения te отраженного эхоимпульса и скорости звука с в воздухе (ок. 340 м/с): l = 0,5·te·с.
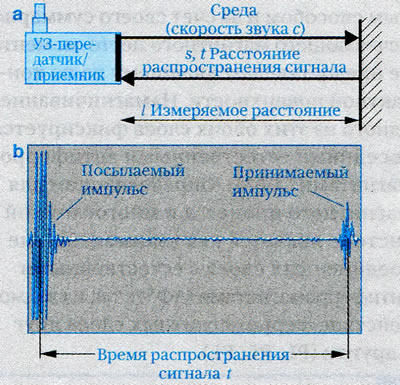
Рисунок 39. Метод эхолота. Принцип измерения расстояния с помощью ультразвука. а. Конструкция; b. Движение сигнала
Во фронтальной и задней зоне автомобиля установлено по 6 датчиков в каждой Таким образом создается большой угол для получения данных для анализа окружающего пространства. Геометрическое расстояние а от препятствия до фронтальной части автомобиля определяется с помощью триангуляционного метода на основании результатов измерений (расстояние b и с) вторых ультразвуковых датчиков, расположенных относительно друг друга на расстоянии d (рис. 40). При приближении к препятствию водитель получает оптический и/или акустический сигнал.
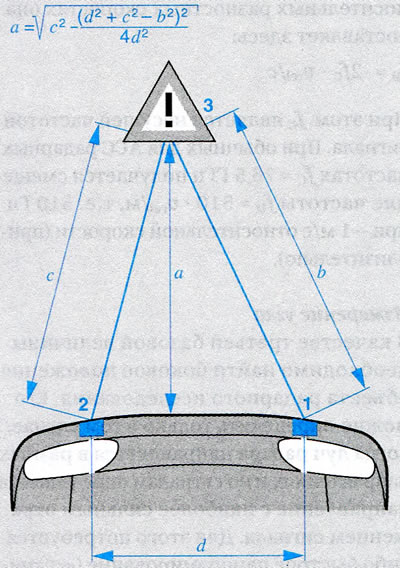
Рисунок 40. Расчет расстояния (триангуляция). а. Расстояние от бампера до препятствия; b. Расстояние от датчика 1 до препятствия; с. Расстояние от датчика 2 до препятствия; d. Расстояние от датчика 1 до датчика 2; 1, 2. Передающий и принимающий датчик; 3. Препятствие
Определяемая характеристика отображена ассиметрично (рис. 41). Определяемый угол по вертикали меньше по сравнению с углом по горизонтали, с целью предотвращения того, чтобы, неровности дороги расценивались как препятствия.
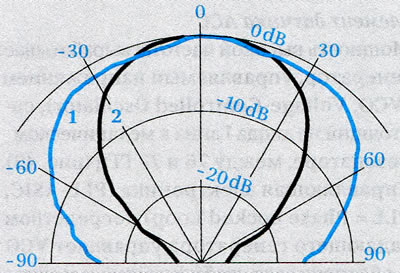
Рисунок 41. Диаграмма излучений антенны ультразвукового датчика. 1. Горизонтальный; 2. Вертикальный
Радарная технология
Для определения окружающего пространства на расстоянии 200 м используется радар (Radio Detection and Ranging). Радары посылают электромагнитные волны, которые отражаются от металлических поверхностей и принимаются приемным устройством радара. На основании сопоставления принятого сигнала с отправленным, с позиции времени и/или частоты, можно определить расстояние и относительную скорость до отражающего сигнал объекта.
Эта технология используется в автомобилестроении в системе ACC (Adaptive Cruise Control, адаптивная регулировка скорости). АСС позволяет выполнять регулировку скорости, в ходе которой скорость уменьшается, когда автомобиль медленно движется вперед, и таким образом выдерживает заданное расстояние.
Измерение времени прохождения сигнала
Во всех принципах работы радара измерение расстояния основывается на прямом и непрямом измерении времени прохождения сигнала в течение времени между передачей сигнала радара и приемом отраженного сигнала. При прямом измерении времени прохождения сигнала измеряется время т. Оно рассчитывается при прямом отражении по отношению двойного расстояния d до отражателя и скорости света с по формуле: τ=2d/с.
При расстоянии d=150 м и с=300000 км/с время прохождения сигнала составляет: τ=1 мкс.
Модуляция частоты
Прямое измерение времени прохождения сигнала является сложной процедурой. Более простым является непрямое измерение времени прохождения сигнала. Данный способ известен как FMCW (Frequency Modulated Continuous Wave) (частотно-моделированное непрерывное колебание). Вместо сопоставления времени переданного сигнала и отраженного сигнала, в радарах FMCW сравнивается частота переданного и отраженного сигналов.
Условием рационального измерения является изменяемая с течением времени несущая частота передатчика.
При использовании метода FMCW волны радара, линейно модулируемые в частоте, посылаются в течение обычно нескольких миллисекунд и имеют девиацию в несколько сотен МГц (fs, кривая на рис. 42, отображенная сплошной линией). Сигнал, отражающийся от автомобиля, едущего впереди, запаздывает согласно времени прохождения сигнала (fe, пунктирная линия на рис. 42). В возрастающей области сигнал низкой частоты, в нисходящей области — высокой частоты пропорционально. Разница частот △f является дискретной величиной для расстояния.
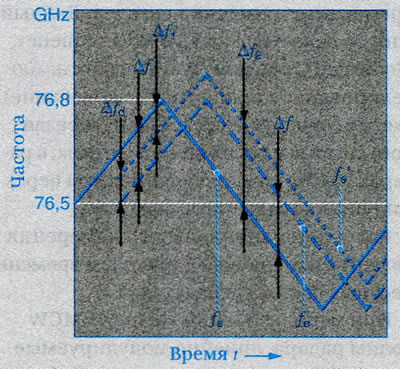
Рисунок 42. Технология FMCW (частотно-моделированное непрерывное колебание). fs. Передаваемый сигнал; fe. Поступающий сигнал при равной скорости; f'e. Поступающий сигнал при наличии относительной скорости
Если дополнительно между автомобилями существует относительная скорость, частота принимаемого сигнала fe увеличивается из-за дублирующего эффекта как в возрастающей, так и в ниспадающей зоне на определенное значение Δfd (fe', линия, обозначенная точками, на рис. 42). За счет этого получаются две разности частот Δf1 и Δf2. Их сложение дает в результате расстояние, их вычитание — относительную скорость автомобилей по отношению друг к другу. Обработка сигнала в частотном диапазоне дает для каждого объекта частоту, которая является линейной комбинацией каждого члена для расстояния и относительной скорости. По измеренным частотам двух зон с различным подъемом можно определить расстояние и относительную скорость для одного объекта. Для ситуаций, в которых участвуют несколько целей, требуется несколько зон с различными подъемами.
Дублирующий эффект
Несмотря на то, что по последовательно выполненным измерениям расстояния можно определить относительную скорость измеряемого объекта, эта измерительная величина быстрее, надежнее и точнее измеряется благодаря использованию дублирующего эффекта.
Для объекта, движущегося относительно в направлении радарного датчика (относительная скорость vrel) отраженный сигнал по отношению к излученному сигналу определяет смещение частоты fD. При относительных разностных скоростях она составляет здесь: fD=-2fс·urel/c.
При этом /с является несущей частотой сигнала. При обычных для АСС радарных частотах fc=76,5 ГГц получается смещение частоты fD=510·vrel/м, т.е. 510 Гц при — 1 м/с относительной скорости (приблизительно).
Измерение угла
В качестве третьей базовой величины необходимо найти боковое положение объекта радарного исследования. Его можно определить только в том случае, когда луч радара направляется в разных направлениях и по сигналам определяется направление с наиболее сильным отражением сигнала. Для этого потребуется либо быстрое панорамирование («сканирование») луча или многолучевое расположение антенн.
Высокочастотный элемент датчика АСС
Мощность высокой частоты вырабатывает генератор, управляемый напряжением (VCO, Voltage-Controlled Oscillator), состоящий из диода Ганна в механическом резонаторе, между 76 и 77 ГГц (рис. 43). Управляющая электроника (PLL-ASIC, PLL = Phase Locked Loop) посредством задающего генератора управляет VCO и обеспечивает стабилизацию и модуляцию частоты.
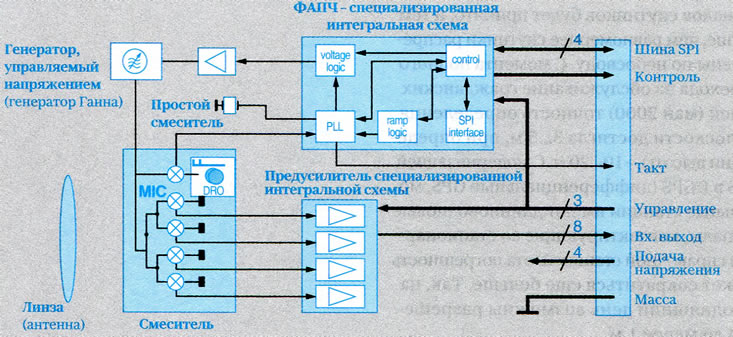
Рисунок 43. Блок-схема четырехканального радара FCMW
Мощность высокой частоты распределяется через делитель Уилкинсона на четыре передающих/принимающих канала. Через «продувной» смеситель эта мощность, с одной стороны, подается на антенну, с другой стороны, принимаемый сигнал «подмешивается» в первичную полосу частот.
Система антенн состоит из четырех комбинированных излучателей, работающих на прием/передачу, на высокочастотной подложке, четырех полистироловых стержневых антенн (пластиковый конус) для предварительной фокусировки и пластиковой линзы для фокусировки луча. Линза используется и как элемент кори экранирование. Радарные волны одновременно излучаются четырьмя излучателями антенн когерентно, в результате создавая волну передатчика. Само по себе разделение на четыре отдельных луча сначала осуществляется на приемной стороне. Здесь используют четыре отдельно надстроенных принимающих канала.
Измерение положения и пути с помощью GPS
GPS является глобальной системой определения местоположения (Global Positioning System) на базе спутников, которую американцы вначале использовали в военных целях, а затем постепенно ввели в гражданское применение. С помощью 24 спутников (21 работающий, 3 запасных) на высоте 20183 км система является полностью функциональной с 1993 года. Между тем, используются даже более чем 24 спутника. Они с периодом обращения в 12 часов распределены на шести орбитах так, что в каждой точке Земли было постоянно видно не менее четырех (часто до восьми).
Они непрерывно передают (цифровые) сигналы на частоте 1,57542 ГГц. Сигналы содержат, упрощенно говоря, следующие данные:
- идентификационный код спутника,
- положение спутника,
- точку передачи данных (включая дату).
Для высокоточного определения времени передачи сигнала на борту спутника имеются по двое часов из цезия и рубидия, погрешность которых составляет менее 20...30 нс. Оцениваемое время передачи сигнала обычно находится в пределах 70 мс. Спутники идентифицируют себя с помощью случайного псевдокода (PRN-номер), который состоит из 1023 бит и повторяется непрерывно через каждую 1 мс. Он передается носителю как фазовая модуляция.
С помощью приемника GPS, состоящего из GPS-антенны, приемной части сигнала, точных часов и микропроцессора, пользователь может, благодаря этой информации, определить собственное географическое положение в трехмерном отображении. Теоретически для этого достаточно трех спутников. Поскольку менее сложные часы мобильных приемников (кварцевые резонаторы) все-таки немного отличаются от часов спутника, приходится привлекать четвертый спутник, с помощью которого элиминируется неточность часов приемника. Из измеренных показателей времени прохождения сигнала делается вывод о расстоянии до «видимых» спутников.
Определение положения осуществляется следующим образом — как показано на рисунке 44 только в двух плоскостях пространства — затем с помощью трилатерации, в соответствии с которой существует только одна точка в пространстве, которая выполняет три условия расстояния. Дополнительно также получают информацию о том, что автомобиль — в отличие от самолета — должен находиться на поверхности Земли.
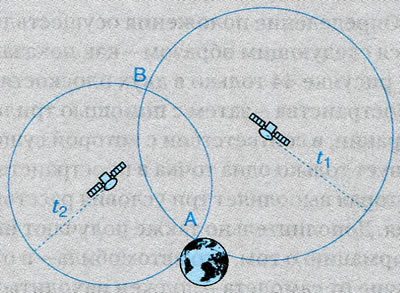
Рисунок 44. Определение положения с помощью GPS. Изображение в плоскости (двухмерной): при известном положении спутников при измеренных показателях времени распространения сигнала f1 и f2 возможные места приема расположены в виде двух окружностей вокруг спутников, которые пересекаются в точках А и В. Точка А, расположенная на поверхности Земли, является искомым местом нахождения принимающего устройства
Измерение будет тем точнее, чем больше сигналов спутников будет принято, и тем лучше, чем равномернее спутники распределены по небосводу. С момента полного перехода на обслуживание гражданских целей (май 2000) точность определения в плоскости достигла 3...5 м, при определении высоты — 10...20 м. С модернизацией GPS в DGPS (дифференциальные GPS, мобильные станции имеют длинноволновые сигналы, контактирующие со стационарной справочной станцией) эта погрешность может сократиться еще больше. Так, на сегодняшний день возможны разрешения до менее 1 м.
Такая точность тем более удивительна, если подумать, каким разнообразным помехам подвергается это очень сложное измерение. Здесь хотелось бы обратить внимание на то, что при высокой скорости ок. 12000 км/ч, с которой движутся спутники, релятивистские эффекты уже не имеют особого значения. При высоких скоростях время идет медленнее, чем на Земле. При более слабой гравитации, которые существуют на орбитах, время идет быстрее. Высокая скорость становится причиной замедления времени в размере 7,2 мкс в день, меньшая гравитация оказывает в шесть раз большее противоположное воздействие.
Если данные о местоположении сохраняются в мобильном приемнике GSP, например, в автомобиле, в большом объеме и часто, то по ним легко можно построить кривую траектории движения и вычислить скорость движения автомобиля. Если данные отправляются через радиопередающий модуль на стационарно установленную центральную станцию, на ней также можно в любой момент узнать о местоположении автомобиля.