
Применение
Микромеханические кремниевые датчики скорости вращения или угловой скорости рыскания (также имеют название «гирометры») считывают в автомобилях скорость вращения автомобиля вокруг своей вертикальной оси с помощью электронной программы стабилизации ESP для регулирования динамики движения, например, во время обычного движения на повороте, а также во время разворота или заноса. Эти датчики заменили использовавшиеся ранее датчики с точной механикой по причине своей улучшенной экономичности и компактности.
В качестве следующей области применения следует назвать определение опрокидывания в приборах управления системой подушек безопасности для приведения в действие системы укладки и натяжения ремней безопасности (например, боковые/оконные подушки безопасности, дуга безопасности кузова) в случае переворота автомобиля. Специально для этой сферы применения были разработаны датчики скорости вращения группы ММ2, отличающиеся оптимальной чувствительностью при определении вращательных движений вокруг продольной оси. Они имеют очень компактную форму и не занимают много места при установке в приборы управления системой подушек безопасности, установленных по продольной оси автомобиля. Общий корпус для чувствительного элемента датчика и электроники, обрабатывающей данные, представляющий собой стандартный корпус 1C, значительно снизил затраты.
Микромеханический датчик скорости вращения ММ1
Для того чтобы добиться высокой точности, необходимой для работы динамической системы автомобиля, используется смешанная технология: две толстые пластины, изготовленные из полупроводника с помощью структурной микромеханики, колеблются противофазно со своей резонансной частотой, обусловленной их массой и жесткостью соединительных пружин (> 2 кГц). На каждой из них установлен поверхностный микромеханический емкостный датчик ускорения наименьшего размера, который может считывать ускорения Кориолиса в плоскости полупроводника перпендикулярно направлению колебаний, когда чип датчика вращается со скоростью Q вокруг своей вертикальной оси (рисунки 1 и 2).
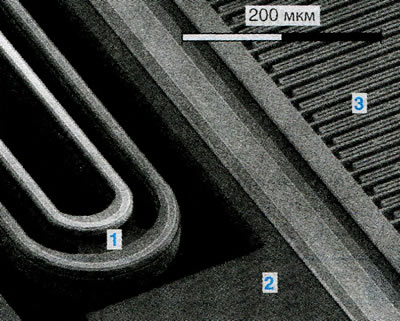
Рисунок 1. Структура датчика скорости вращения ММ1. 1. Пружинная защелка/направляющая пружина; 2. Часть колебательной пластины; 3. Датчик ускорения Кориолиса
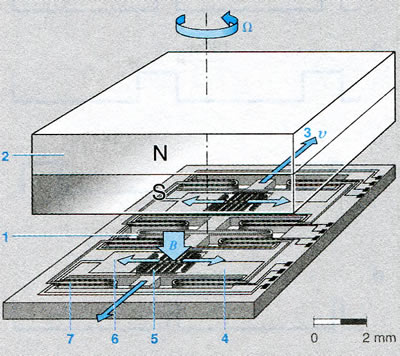
Рисунок 2. Микромеханический датчик скорости вращения (конструкция). 1. Пружина, задающая частоту; 2. Постоянный магнит; 3. Направление колебания; 4. Колебательная пластинка; 5. Датчик ускорения Кориолиса; 6. Направление ускорения Кориолиса; 7. Пружинная защелка/ направляющая пружина; Ω. Скорость вращения; v. Скорость колебаний; В. Поле постоянного магнита
Ускорения Кориолиса пропорциональны скорости вращения и скорости колебаний, электронно настроенной на постоянное значение.
Для привода используется простая токопроводящая дорожка на соответствующей колебательной пластине, которая определяет силу Лоренца в постоянном магнитном поле В перпендикулярно поверхности чипа. С помощью другого простого проводника, занимающего небольшую площадь чипа, индуктивным способом тем же магнитным полем измеряется непосредственно скорость колебаний. Различная физическая природа приводной и сенсорной систем исключает нежелательное взаимодействие двух элементов. Оба противоположных сигнала датчиков отделяются друг от друга для подавления внешних посторонних колебаний (синфазный сигнал) (путем суммирования можно измерить и внешнее постороннее ускорение, если в этом есть необходимость). Точная микромеханическая конструкция помогает подавить воздействие высокого колебательного ускорения относительно ускорения Кориолиса, которое ниже на несколько десятичных порядков (поперечная чувствительность значительно ниже 40 дБ). Приводная и измерительная системы здесь должны быть обязательно разъединены как механически, так и электрически.
Микромеханический датчик скорости вращения ММ2
Если кремниевый датчик скорости вращения изготавливается полностью по поверхностной микромеханической технологии (ОММ) и одновременно заменяет магнитную приводную и регулирующую системы электростатической, то разъединение приводной и измерительной систем можно осуществить менее последовательно. Установленный на центральном подшипнике крутильный колебательный прибор электростатически приводится в движение гребневыми структурами (рис. 3 и 4), амплитуда колебаний поддерживается постоянной благодаря подобному емкостному отводу.
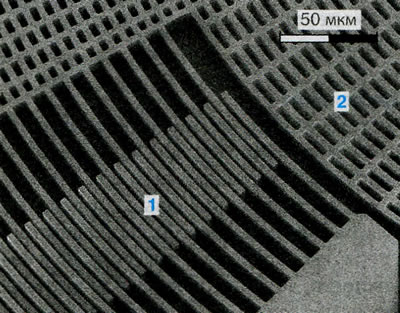
Рисунок 3. Структура датчика скорости вращения ММ2. 1. Гребневая структура; 2. Крутильный колебательный прибор
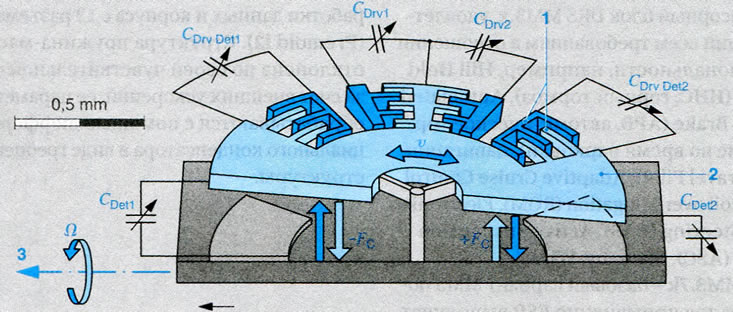
Рисунок 4. Поверхностный микромеханический датчик скорости вращения ММ2 (конструкция). 1. Гребневая структура; 2. Крутильный колебательный прибор; 3. Измерительная ось; CDrv. Приводные электроды; CDet. Емкостное считывание скорости вращения; FC. Сила Кориолиса; v. Скорость колебаний; Ω=ΔCDet. измеряемая скорость вращения
Силы Кориолиса вызывают одновременное поперечное движение тангажа, амплитуда которого пропорциональна скорости вращения Q и емкостно определяются электродами, расположенными под вибратором (маятником). Чтобы не гасить это движение слишком сильно, датчик должен работать в вакууме. Хотя небольшой размер чипа и простая процедура изготовления приводят к значительной экономии затрат, все-таки уменьшение снижает и без того небольшой измерительный эффект и точность. Возникает необходимость в высокоточной электронике. Воздействие посторонних ускорений здесь подавляется уже механически за счет установки на подшипниках на центральной оси, а также жесткости системы при изгибе.
Блок датчика DRS ММЗх
В блоке датчика DRS ММЗх используется новое поколение микромеханических элементов, измеряющих угловую скорость и ускорение, а затем обрабатывающих данные цифровым способом. На основе технологии проводниковых пластин они формируют модульную концепцию для аппаратного обеспечения и программного обеспечения с множеством внедренных новых принципов безопасности, которые приводят к разнообразным и надежным решениям в разных областях применения автомобильной промышленности.
Применение
Система ESP, сочетание с системами шасси и комфорта и разработка прогрессивных систем стабилизации автомобиля нуждаются в инерциальных сигналах с высокими требованиями, касающимися в первую очередь качества сигнала и надежности, дополнительных измерительных осей в сочетании с высокой надежностью. Поэтому «Bosch» разработала третье поколение, разносторонний и экономичный сенсорный блок DRS ММЗ.х, удовлетворяющий всем требованиям в отношении функциональности, например, Hill Hold Control (ННС, горный тормоз), Automated Parking Brake (APB, автоматическое торможение во время парковки), навигация (Navi, Travel Pilot), Adaptive Cruise Control (ACC), Roll over Mitigation (ROM), Electronic Active Steering (EAS), Active Suspension Control (ASC), Steer-by-Wire.
DRS MM3.7k — базовый вариант ММЗ поколения для применения ESP выполняет все эти функции. В данную систему входит датчик скорости вращения и интегрированный модуль поперечного ускорения.
Принцип функционирования
Новый микромеханический измерительный элемент для измерения скорости вращения относится к известной группе колебательных гирометров, работающих по принципу Кориолиса (CVG = Coriolis Vibrating Gyros). Он состоит из инверсного камертона с двумя вертикально расположенными относительно друг друга линейными колебательными модами, приводным контуром и контуром обработки данных. Привод и обработка данных осуществляются электростатически с помощью гребневой структуры. Измерение ускорения Кориолиса выполняется электростатически с помощью электродов, входящий друг в друга. Измерительный элемент состоит из двух корпусов, соединенных с помощью сцепляющей пружины. Резонансная частота равна для обоих колебательных режимов. Она составляет стандартно 15 кГц и поэтому находится за пределами диапазона помех, типичного для автомобиля, и поэтому устойчива к колебаниям помех. Схема обработки данных (ASIC) и микромеханический измерительный элемент находятся в одном готовом корпусе с 20 разъемами (Premold 20).
Модуль ускорения можно сравнить с модулем скорости вращения по структуре, он состоит из микромеханического измерительного элемента, электронной схемы обработки данных и корпуса с 12 разъемами. (Premold 12). Структура пружина-масса отклонена по своей чувствительной оси за счет внешних ускорений, ее параметры обрабатываются с помощью дифференциального конденсатора в виде гребневой структуры.